OBJECTIVE: To analyse the vertical and anteroposterior components of the ground reaction force during shallow water running at 2 levels of immersion.
SUBJECTS: Twenty-two healthy adults with no gait disorders, who were familiar with aquatic exercises.
METHODS: Subjects performed 6 trials of water running at a self-selected speed in chest and hip immersion. Force data were collected through an underwater force plate and running speed was measured with a photocell timing light system. Analysis of covariance was used for data analysis.
RESULTS: Vertical forces corresponded to 0.80 and 0.98 times the subject’s body weight at the chest and hip level, respectively. Anteroposterior forces corresponded to 0.26 and 0.31 times the subject’s body weight at the chest and hip level, respectively. As the water level decreased the subjects ran faster. No significant differences were found for the force values between the immersions, probably due to variability in speed, which was self-selected.
CONCLUSION: When thinking about load values in water running professionals should consider not only the immersion level, but also the speed, as it can affect the force components, mainly the anteroposterior one. Quantitative data on this subject could help professionals to conduct safer aquatic rehabilitation and physical conditioning protocols.
Key words: aquatic exercise; aquatic rehabilitation; running; kinetics.
J Rehabil Med 2010; 42: 664–669
Correspondence address: Alessandro Haupenthal, Rua Ivo Silveira, 177, apto 802, 88085-001, Florianópolis, SC, Brazil. E-mail: dedsnet@yahoo.com.br
Submitted May 20, 2009; accepted April 14, 2010
INTRODUCTION
Water running, as a fundamental component of most aquatic rehabilitation and training protocols, has been little explored in terms of biomechanical variables, which makes the prescription of this exercise by physiotherapists and kinesiologists difficult when there is a need to control the mechanical load acting on the individual.
Many studies have investigated the use of water running to maintain and improve physical conditioning, based on the analysis of physiological variables such as blood pressure, heart rate, oxygen debt and volume, body temperature, etc. (1–4). Regarding aquatic rehabilitation, investigators have focused on the treatment of specific pathologies through the use of this exercise in hydrokinesitherapy sessions (5–9). However, studies of biomechanical variation during the performance of water exercises are scarce. Although the kinetic and kinematic characteristics of walking in water have been studied over the past few years (10–15), information regarding the biomechanics of shallow water running is less common, considering only kinematic aspects (16) or even speculating on kinetic aspects based on the interpretation of indirect static measurements (17).
Despite the fact that weight-bearing is facilitated in the water due to buoyancy, running in shallow water still involves contact forces, thus the components of the ground reaction force (GRF) are required for the execution of the exercise. The values of this component in water should be lower than those observed during over-ground running but, in some cases, they could be excessive and even harmful, depending on the condition of the individual. An alternative, in order to reduce the risk of injury and to better adjust the exercise conditions in these cases, is to vary the level of immersion.
It is also important to consider that the resistance imposed on the body during aquatic locomotion is much greater than that on land (18), as water is approximately 800 times denser than air (19). Because of this the anteroposterior component of the GRF is also required to displace the body forwards and run in the water.
The aim of the present study was to analyse the vertical and anteroposterior components of the GRF during shallow water running at a self-selected speed at 2 levels of immersion.
The values of the GRF components can provide valuable information concerning the resultant force acting on the individual when running in the water. This is crucial for training prescription and rehabilitation in the aquatic environment.
METHODS
Twenty-two subjects (11 males, 11 females), who volunteered in response to an advertisement, participated in this study. Before any data were acquired, the subjects were analysed to verify gait disorders, percentage of body fat (which should range from 12% to 16% for men and from 20% to 25% for women, based on Pollock & Wilmore (20)) and to ascertain whether they were familiar with aquatic exercises. After that, the selected individuals were asked to participate in this study and all signed an informed consent form previously approved by the Committee for Ethics in Research on Humans of the Institution. Mean (standard deviation; SD) age, height and mass for the male subjects were 24.0 (3.0) years, 1.80 (0.05) m and 74.6 (6.8) kg, respectively. For the female subjects, the mean (SD) age, height and body mass were and 23.0 (2.5) years, 1.67 (0.05) m and 56.3 (3.8) kg, respectively.
All tests and procedures were carried out at the swimming pool and at the Aquatic Biomechanics Research Laboratory of Santa Catarina State University, Florianópolis, Brazil. In order to measure the vertical and anteroposterior components of the GRF (Fy and Fx, respectively), an 8.0 m long walkway platform (covered with non-slip material) containing an underwater force plate was placed at the bottom of a heated swimming pool (30 ± 1 °C). The acquisition system was composed of the underwater force plate (dimensions 400 mm × 400 mm × 100 mm, sensitivity of 2 N, error lower than 1% and 300 Hz natural frequency), the ADS2000-IP for signal conditioning and A/D conversion and the software AqDados 7.02 for signal analysis and editing (Lynx Tecnologia Eletrônica LTDA, São Paulo, SP, Brazil).
Data collection procedures began with measuring the anthropometric data as follows: (i) body mass of the subjects using an electronic scale (Plenna, model MEA-08128, scale 0.1 kg, São Paulo, Brazil); (ii) height of the subjects using a stadiometer (Sanny American Medical do Brasil LTDA, scale 0.01 m, São Bernardo do Campo, SP, Brazil); and (iii) subjects’ cutaneous folds using a scientific calliper (CESCORF Equipamentos Antropométricos LTDA, scale 0.1 mm, Porto Alegre, RS, Brazil).
The percentage of body fat was determined through calculation of subjects’ body density (21). For the male subjects, body density was calculated via a regression equation using the sum of the thoracic, abdominal and thigh skin folds (22). In women, the regression equation uses the sum of the tricipital, supra-iliac and thigh skin folds (23).
After the anthropometrical measurements, the subjects were asked to enter the pool. Each subject underwent an adaptation period in order to get used to the equipment and data collection conditions. Subsequently, the subjects were instructed to perform 6 trials of water running at a self-selected speed at each of the 2 levels of immersion: (i) chest level, which corresponds to the subject’s xiphoid process sterni; and (ii) hip level, which corresponds to the subject’s iliac crest (Fig. 1). The walkway platform was adjusted according to each subject’s height and these levels of immersion were chosen by the researchers because they correspond to anatomical points that can be identified easily by professionals who often prescribe aquatic exercises in their daily work routines.
Fig. 1. Immersion levels used in the study: chest level (left) and hip level (right).
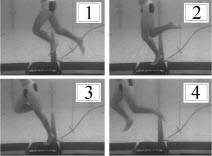
The trials were considered valid when the subjects touched one of their feet to the force plate, presenting a flight phase (with no double support phase), without looking downwards and without reducing the rhythm of movement (Fig. 2).
Fig. 2. Example of a valid trial: (1) approach, (2) foot contact, (3) propulsion, and (4) flight phase.
Running speed was measured with a system composed of an electronic synchronized stopwatch and 2 photocell timing lights, positioned 2.5 m apart.
The total number of analysed force curves was 528 (6 Fy and 6 Fx curves per subject at each level of immersion). The curves were exported and analysed through a processing routine created with Scilab 4.1.2 software (Institut Nationale de Recherche en Informatique et en Automatique – INRIA, Ecole Nationale des Ponts et Chauss – ENPC, France), which consisted of the following phases: (i) offset correction; (ii) application of the calibration coefficient and filters (Butterworth with a low-pass cut-off frequency of 20 Hz, order 3, determined from analysis of the spectral density of the signal strength); (iii) normalization by the body weight measured outside the water (in order to observe the percentage of load reduction in comparison with the values obtained outside the water); (iv) verification of the vertical force peak (Fy peak) and of the anteroposterior force peak (Fx peak). For this study, the peaks were defined as the maximum value presented by the components, normalized by body weight, occurring at any period of time from the beginning until the end of the GRF curve; (v) verification of contact time during the support phase (time elapsed between the first and the last contact of the foot with the force platform); (vi) calculation of loading rate (LR). The LR was calculated from the linear slope, from initial contact to the onset of maximum force, for the vertical component of the GRF; (vii) time normalization by the percentage of support; and (viii) calculation of the Fy and Fx mean curves, in units of body weight (BW).
Data were analysed through the statistical package SPSS version 13.0. Descriptive statistics (mean and SD) and inferential statistics (analysis of covariance (ANCOVA), with speed as a covariate) were used, once the normality and homogeneity of data had been confirmed through the Shapiro Wilk and Levene tests, respectively. The level of significance was set at p < 0.05.
RESULTS
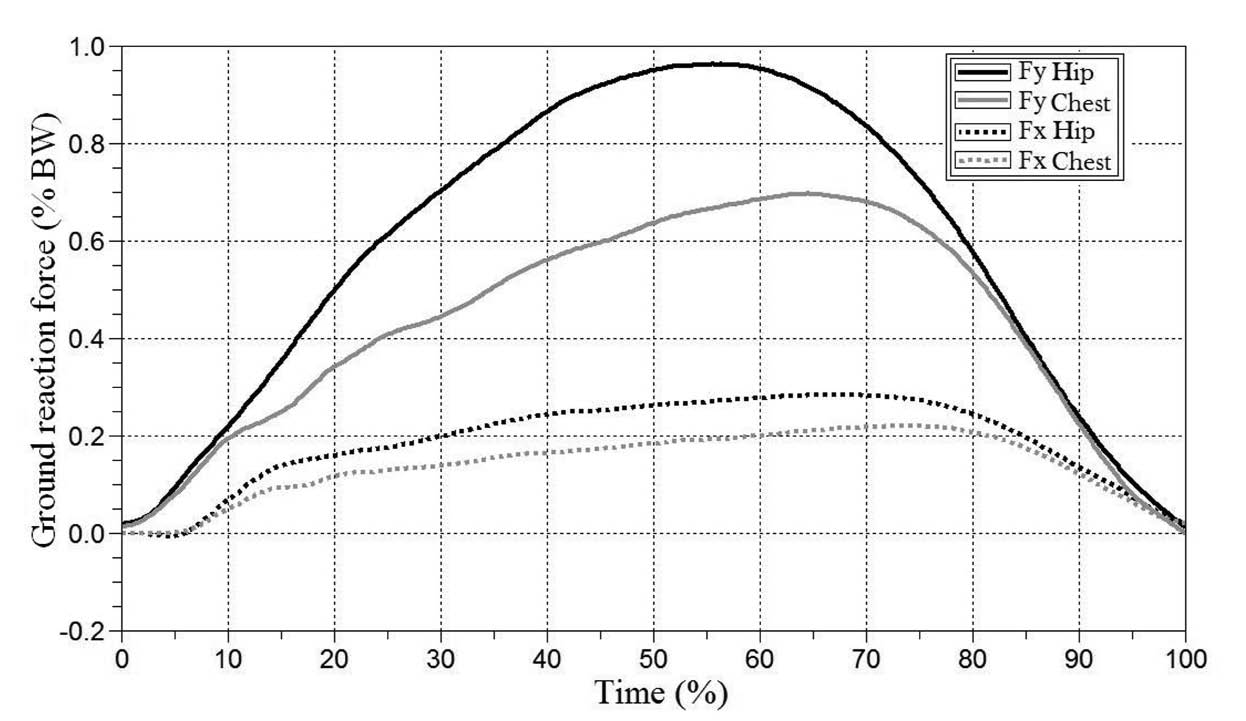
Fig. 3 shows the average curves for the vertical (Fy) and the anteroposterior (Fx) components of the ground reaction force during shallow water running at the chest and hip levels of immersion.
Fig. 3. Vertical (Fy) and anteroposterior (Fx) forces applied by the subjects during shallow water running (Fy at hip level – black solid line; Fy at chest level – grey solid line; Fx at hip level – black dotted line; Fx at chest level – grey dotted line). Note: since the average curves were calculated based on individual curves normalized by the contact time, their interpretation should be limited to the morphology analysis. For reference values for Fy and Fx peaks, see Table I.
The curve morphology for each GRF component was similar when comparing the levels of immersion. However, when comparing the patterns obtained underwater with the characteristics of a force curve produced during over-ground running there are some differences. Regarding the vertical component, the impact peak that usually occurs on land (24–27) was not observed in the water. Considering the anteroposterior component, on land the Fx curve presents 2 peaks that are clearly identified, 1 negative and 1 positive (28–30); in water the negative peak, for most of the subjects, did not occur and only the positive peak was observed at the end of the propulsion phase.
Table I shows the means and SD of the variables.
| Table I. Vertical force peak, anteroposterior force peak, loading rate, contact time and running speed in each level of immersion (mean (SD)) |
| Immer-sion level | Fy (BW) | Fx (BW) | LR (BW/s) | CT (s) | RS (m/s) |
| Chest | 0.80 (0.24) | 0.26 (0.07) | 3.38 (1.40) | 0.50 (0.15) | 0.67 (0.07) |
| Hip | 0.98 0.18) | 0.31 0.07) | 4.25 (1.63) | 0.46 (0.11) | 0.88 (0.10) |
| GRF: ground reaction force; Fy: vertical component of the GRF; Fx: anteroposterior component of the GRF; BW: units of body weight; LR: loading rate; CT: contact time; RS: running speed; SD: standard deviation. |
When the subjects were immersed to chest level the magnitude of Fy peak varied from 0.39 to 1.24 BW (mean 0.80, SD 0.24 BW). At the hip level, Fy peak varied from 0.70 to 1.50 BW (mean 0.98, SD 0.18 BW). The Fx peak ranged from 0.12 to 0.36 BW (mean 0.26, SD 0.07 BW) and from 0.19 to 0.47 BW (mean 0.31, SD 0.07 BW) at the chest and hip levels, respectively.
No difference was found between the contact times and loading rates when comparing the levels of immersion (p = 0.083 and 0.616, respectively). However, the subjects ran faster (p < 0.001) when immersed to the hip (mean 0.88, SD 0.10 m/s) than to the chest (mean 0.67, SD 0.10 m/s).
The results of the ANCOVA showed that the difference between the levels of immersion was not significant both for Fy peak (F = 2.261, df = 1, p = 0.140) and Fx peak (F = 3.202, df = 1, p = 0.081). The effect of running speed on force values was significant only for Fx peak (F = 27.730, df = 1, p < 0.001) and not for Fy peak (F = 0.036, df = 1, p = 0.081).
DISCUSSION
The results of this study show that there is no significant difference for the vertical and anteroposterior force peaks between the hip and chest immersions, probably due to variability in speed, which was self-selected.
When running over-ground, the vertical impact peak occurs within 50 milliseconds after foot strike, which corresponds to one spike in the GRF curve. This impact phase has been studied extensively over the years (24–27), mainly because of the great number of runners all over the world, the development of shoes, and the risk of injuries. As this impact peak does not exist during shallow water running, this exercise could be used as an alternative way to maintain or even improve the physical conditioning of athletes and patients under treatment with a lower amount of load during the foot contact.
The anteroposterior component of the GRF is mainly related to the accelerations required to move the body forward and it is necessary to change the movement speed (28–30). The Fx curves in water running did not present the first negative peak, which can be related to the lower speed in relation to over-ground running and by the water resistance acting on the individuals. Similar results were found by Roesler et al. (15) when analysing the underwater walking in fast speed situations. The authors suggested it might be because the subjects modify the walking support phase in the water in an effort to gain speed, leaning the body forward and touching the force plate only when the leg has already passed the longitudinal body axis. When running in water, subjects must also alter the mechanics of running (18), modifying their support technique (the heel does not touch the force plate) and performing only the propulsion (positive) phase, with the maximum force occurring by the end of the contact (70–80% of foot contact) at both levels of immersion.
According to the literature the values of the vertical component of the GRF during over-ground running vary from 1.6 to 4.0 BW and for over-ground walking the value is approximately 1.2 BW (28–30). The only information about the values for water running was given by Andrews et al. (17), who suggested that the vertical force acting on an individual who runs immersed to the shoulder corresponds to 0.1 BW. However, this suggestion was based on the study of Harrison & Bulstrode (31), who measured the Fy values with the subjects immersed to several levels in the upright position. Roesler et al. (15) had already found values higher than 0.1 BW for slow speed walking in water with subjects immersed to the shoulder. Thus it was expected that the values for water running would be higher than those suggested by Andrews et al. (17) and lower than those presented for over-ground running. The mean Fy peak values found confirmed these expectations and were even lower than the values of over-ground walking. The results show that the idea of considering the values of load reduction based on the subjects’ static weight when prescribing aquatic exercises, such as walking and running, as done by Andrews et al. (17), could be erroneous.
Another interesting variable is the rate of application of vertical force, which represents the intensity of the load in relation to time. The greater the loading rate, the greater the intensity of force acting on the body structures. From Fig. 3 it can be seen that there is a difference in the slope of the Fy curves, which is a representative characteristic of the loading rate. In this case, the slope of the curve corresponding to the level of the hip is steeper, resulting in a shorter time for the application of the force and, consequently, to higher loading rates. The differences between the levels were not significant, although the values obtained for running in the water are much lower than those found for walking out of the water (from 9 to 11.5 BW/s) and correspond to less than one-third of the values for running on dry land (from 15 to 30 BW/s) (25, 32, 33). In this way, besides the absence of impact peaks, cushioning of the load in water running occurs more smoothly compared with walking or running on dry land, representing a further indicator for recommending this type of activity in cases in which the workload needs to be reduced.
Considering the anteroposterior component of the GRF, the values range from 0.15 to 0.20 BW and from 0.4 to 0.5 BW for over-ground walking and running, respectively (28–30). No Fx values for water running have been reported in the literature. In this study the mean Fx peak in both levels of immersion was higher than the values for over-ground walking and lower than those for over-ground running.
In relation to speed, the analyses carried out in this study demonstrate that this variable significantly influences the values of Fx. On including speed in the statistical analysis, the differences between the levels of immersion are not significant. In this way, we should be alert to the risk of mistakenly believing that by simply increasing the level of immersion we would be guaranteeing a significant reduction in the vertical loads acting on the musculoskeletal system of the subjects.
In the rehabilitation process, activities in the water can be started earlier than on land; however, when choosing the exercise, the immersion level, and the movement speed/rhythm the professional should consider the subject’s capacity to generate enough muscular force to perform the exercise against the resistance of the water.
In walking or running the musculature can be recruited in different ways depending on the manner of execution, the speed of the movement and the environment in which the exercise is performed. On changing the level of immersion for exercise carried out in water, the vertical force opposing gravity is altered, in particular (13, 15). In this way, we prioritize the work of the musculature that responds to gravity during exercise. For example, when we reduce the level of immersion we mainly increase the electromyographic response of the soleus in relation to the gastrocnemius (13, 34). However, when the running speed is altered, it is mainly the anteroposterior component of the force that is modified. This increase in the intensity of Fx may also be related to the increase in the electromyographic response of the musculature responsible for the task, as demonstrated by Miyoshi et al. (13), who analysed walking in water and observed an increase in the activation of the dynamic musculature (for example, the gastrocnemius in relation to the soleus) with increased speed.
Furthermore, the increase in speed leads to higher moments of force on the hip joint (12). According to Kaneda et al. (34), on increasing running speed in the water there is a marked activation of the musculature around the hip, at higher intensities than those observed with walking on dry land. As a result, despite the magnitude of the vertical component being lower for water running, the magnitude of the anteroposterior component is the same. In this situation, a patient with a hip prosthesis, for example, could be put at risk if this exercise were prescribed too early, based only on the obvious information concerning reduced vertical loads in water. In the case of patients with muscle injuries, for example, a cautious approach should be taken due to the need to overcome the resistance to running in water, which is greater than that encountered during locomotor activities on dry land. Therefore, it is important to consider not just the behaviour of vertical loads for the appropriate prescription of exercise in water, since anteroposterior loads also have a considerable magnitude and can demand raised levels of muscle activity.
On the other hand, there are some situations of less risk for which water running can be recommended with greater safety and without further concerns. For example, as this exercise is performed with the head out of the water, it is a feasible alternative for physical training for low-risk cardiac patients (35, 36). Furthermore, elderly, obese individuals and rheumatic patients respond positively to exercise in water (1, 37–39). For these individuals, exercises on dry land generally cause joint pain as a result of the load. In these cases the water provides a safe (less chance of falls or traumatic events) and comfortable medium in which to exercise, without further risks in relation to joint loading.
Exercises in water are also indicated in processes of rehabilitation from fractures. For example, during rehabilitation after a stress fracture, which is a very common injury in runners, running in water guarantees the individual maintenance or even improvement in physical conditioning, besides maintaining the specificity of the activity. In the process of rehabilitation after fractures, it is common to require control of loading on commencing activities with the patient. Traditional methods for the control of loading, such as crutches and parallel bars, or even control based simply on the perception of the individual, do not always guarantee unloading of the joint, and may lead to injury. Some authors have demonstrated that, even with training, patients are not capable of detecting and controlling the load imposed on the affected limb during more intense exercise (40, 41), and for this reason physiotherapists have opted for exercises in the water (2, 3, 8), where the support of the body weight provided by the buoyancy facilitates control of the load. At the same time, the size of the load acting on the individual exercising in water is often determined from practical experience acquired during the working routine, since published data on this theme are scarce.
In conclusion, the results of this study show that there are differences in the pattern (morphology) of vertical and anteroposterior force curves during shallow water running compared with the curves for over-ground running. Regarding the comparison between the levels of immersion, though it seems quite logical that the deeper water would result in lower ground reactions forces, the difference between the force peaks was not significant, probably because running speed was not the same at both levels of immersion. Consequently, not only the level of immersion but also the speed of displacement should be considered when running in water. Furthermore, despite the values of Fy being lower than those found in literature, both for running and walking on dry land, attention should be given to the values of Fx, since they are similar to the values for over-ground running and higher than those reported for over-ground walking.
An analysis of the components of the GRF at different speeds of movement, combined with its analysis at different levels of immersion, would provide a better understanding of the loads applied during shallow water running, supporting the use of this exercise in different populations. Knowing the values of force acting on an individual during shallow water running could help professionals to conduct safer protocols of aquatic rehabilitation and physical conditioning, considering not only the physiological alterations that occur in the aquatic environment, but also the load patterns in different situations.
ACKNOWLEDGEMENTS
We gratefully acknowledge the members of the Aquatic Biomechanics Research Laboratory of UDESC and the CAPES Scholarship Programme, Brazil.
REFERENCES