
From the 1Rehabilitation Institute of Chicago, 2Department of Physical Medicine and Rehabilitation, 3Department of Orthopaedic Surgery 4Department of Biomedical Engineering, Northwestern University, Chicago, IL 5Department of Physical Therapy & Rehabilitation Science, 6Department of Orthopaedics, University of Maryland, Baltimore and 7Department of Bioengineering, University of Maryland, College Park, MD, USA
Objective: To evaluate the feasibility and effectiveness of a wearable robotic device in guiding isometric torque generation and passive-active movement training for ankle motor recovery in children with acute brain injury.
Participants/setting: Ten inpatient children with acute brain injury being treated in a rehabilitation hospital.
Design: Daily robot-guided ankle passive-active movement therapy for 15 sessions, including isometric torque generation under real-time feedback, stretch-ing, and active movement training with motivating games using a wearable ankle rehabilitation robot.
Main measures: Ankle biomechanical improvements induced by each training session including ankle range of motion (ROM), muscle strength, and clinical (Fugl-Meyer Lower-Extremity (FMLE), Pediatric Balance Scale (PBS)) and biomechanical (ankle ROM and muscle strength) outcomes over 15 training sessions.
Results: As training progressed, improvements in biomechanical performance measures followed logarithmic curves. Each training session increased median dorsiflexion active range of motion (AROM) 2.73° (standard deviation (SD) 1.14), dorsiflexion strength 0.87 Nm (SD 0.90), and plantarflexion strength 0.60 Nm (SD 1.19). After 15 training sessions the median FMLE score had increased from 14.0 (SD 10.11) to 23.0 (SD 11.4), PBS had increased from 33.0 (SD 19.99) to 50.0 (SD 23.13) (p < 0.05), median dorsiflexion and plantarflexion strength had improved from 0.21 Nm (SD 4.45) to 4.0 Nm (SD 7.63) and 8.33 Nm (SD 10.18) to 18.45 Nm (SD 14.41), respectively, median dorsiflexion AROM had improved from –10.45° (SD 12.01) to 11.87° (SD 20.69), and median dorsiflexion PROM increased from 20.0° (SD 9.04) to 25.0° (SD 8.03).
Conclusion: Isometric torque generation with real-time feedback, stretching and active movement training helped promote neuroplasticity and improve motor performance in children with acute brain injury.
Key words: traumatic brain injury; rehabilitation; robotics; acute-phase.
Accepted Sep 11, 2017; Epub ahead of print Oct 27, 2017
J Rehabil Med 2018; 00: 00–00
Traumatic brain injury (TBI) is a leading cause of long-term disability in the USA, affecting 1.7 million Americans, including over 510,000 children 0–14 years of age annually (1). Many paediatric patients with TBI have motor impairment (89%), with a prevalence of quadriplegia (53%) and hemiparesis (29%) (2, 3). Recovery of mobility and walking ability is a primary rehabilitation goal, considering that TBI often induces considerable ankle and foot impairment, including spasticity, contracture, muscle weakness and motor impairment, contributing directly to impaired balance and locomotion (4–6).
Therapeutic training helps to facilitate neuroplasticity and motor recovery following brain injury, especially during the acute and sub-acute stages of heightened neuroplasticity (7–9). Early intensive rehabilitation following TBI is therefore critical in promoting neuroplasticity (7, 10, 11) and improving functional outcomes (12, 13). However, patients with TBI have only 1–2 h of rehabilitation each day (13, 14). More intensive activity-based rehabilitation is needed to facilitate neuroplasticity and promote recovery post-TBI (13, 15, 16).
Robot-aided therapy for neurorehabilitation can provide early, intensive, task-specific, and interactive treatment of the impaired limb and monitor patients’ motor progress objectively (17, 18). Robot-aided therapy delivers engaging high-intensity intervention, guides patients via real-time audiovisual feedback, and provides assistance as needed, which is important during the acute period post-TBI when maximal recovery occurs (11). Robotic therapy with a games-based interface also engages and motivates patients, which is especially important for children with TBI.
Various interventions for improving strength, spasticity, and gait have been used recently in patients with TBI, including exercises, stretching, active and passive range of motion, and assistive devices (8, 9, 19). However, few studies have used robotics with the TBI population, especially with the inpatient paediatric population. Furthermore, the majority of studies have been designed for voluntary movement training and not for forceful, precise controlled stretching with precise control (20–25). Although there have been a number of robotic devices developed for rehabilitation that demonstrate improvements in ankle performance or gait function (26–29), currently there is a lack of rehabilitation devices and effective protocols offering motor re-learning with real-time feedback, well-controlled passive stretching, motivating active movement training with sufficient repetitions, to improve mobility, balance and locomotion, especially for paediatric patients with acute TBI.
The objectives of this study were to evaluate the feasibility and effectiveness of a wearable robotic device in facilitating motor re-learning with isometric torque generation with real-time feedback, and conducting passive and active movement training in early in-bed training of children with acute brain injury. It was assumed that robot-guided motor training, passive stretching and active movement training would improve ankle biomechanical and neuromuscular properties, and improve balance and gait performance in children with acute brain injury.
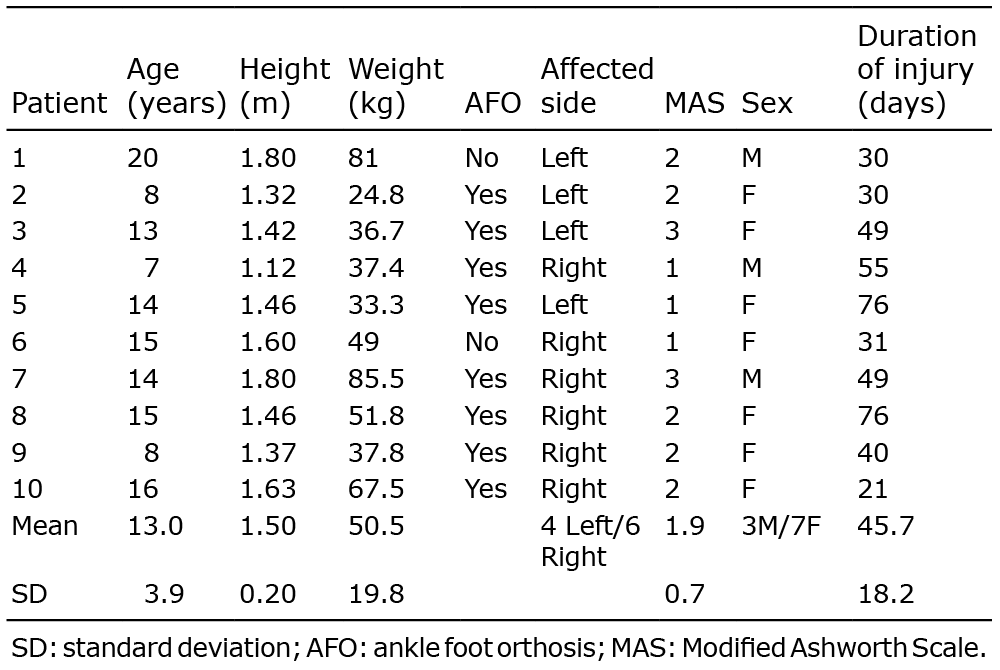
Ten children with acute brain injury (7 girls, 3 boys) participated in the study, which was given a power of 84.14%, although 3 out of 13 patients declined to participate (Table I). All were inpatients hospitalized following brain injury (mean 45.7 (SD 18.2) days after the initial brain injury), and had impairment in at least one of the lower limbs, with reduced or zero voluntary movement of the ankle, as the inclusion criteria. All patents provided informed consent, which was approved by the Institutional Review Board. Eight out of the 10 patients completed 15 sessions of training during their hospital stay. The other 2 patients completed 12 sessions, due to early discharge.
Table I. Characteristics of the patients with traumatic brain injury
A wearable rehabilitation robot with computer game interface was used to conduct guided isometric torque generation under real-time feedback, passive stretching and active movement training (30). The robot can also measure biomechanical properties, including ankle active range of motion (AROM), passive range of motion (PROM) and muscle strength, measured as maximum voluntary contraction (MVC) in dorsiflexion and plantarflexion. The robotic device was equipped with a servomotor, a force sensor and a digital controller. It was connected to a touchscreen computer for display and user interface (Fig. 1). The interface allowed adjustment of the applied torque value, motion velocity, and difficulty levels of the exercise games, such as assistance or resistance level, according to patient’s ability.
Fig. 1. (a) The wearable rehabilitation robot used in intelligent stretching and active movement training of the ankle. The foot and leg of the subject was strapped to the wearable robot and audiovisual feedback was provided to the patient. (b) Change in isometric torque generation recorded in 1 participant. The patient could not generate any torque initially (top plot), but could gradually generate torque more consistently after repeated training (bottom plot). Inset: screenshot of feedback provided to the acute patient in bed for isometric torque generation training. With the ankle fixed in an isometric condition, the patient was asked to make the yellow line (measured weak joint torque) within the red bar as tall as possible.
Starting from early stage of recovery, the patient’s re-emerging motor output signal was detected sensitively by the wearable robot as the isometric joint torque generated, which was fed back to guide the patients to improve joint torque generation (Fig. 1).
Robotic therapy was conducted 3–5 times a week (depending on the inpatients’ schedule and length of hospital stay) along with their conventional therapies. Each session involved 10 min stretching, 20 min assisted/resisted active movement training, followed by 10 min stretching. At the beginning and end of the training session, biomechanical properties, including ankle AROM and muscle MVC in dorsiflexion and plantarflexion, were measured.
Patients lay supine in their bed or sat in bed with back support. They wore the wearable robot on the impaired ankle, and were facing the touchscreen computer, which was placed in front of them with height and angle adjusted for correct viewing (Fig. 1). The robotic boot was adjusted to align the ankle axis with the motor shaft and a sensor measured the dorsal-plantar flexion torque.
The joint ROM and torque limits were determined for passive stretching, and an intelligent control algorithm allowed strenuous and safe passive stretching. Increasing resistance near the extreme position of the joint gradually slowed down the motor in order to stretch the muscle-tendon complex slowly and safely. Once the predefined peak resistance torque was reached, the joint was held at the extreme position for 5–10 s to allow soft tissue stress relaxation. In the middle ROM, the joint was moved at higher speeds. In addition to torque limits, the operator also specified position limits that could be exceeded by a pre-specified amount for potential stretching-induced improvement.
During stretching, the patient was instructed to relax and to not react to the stretch. If the patient reacted to the stretching with high resistance, the robot would stop if a target resistance torque was reached, or reverse the direction of movement if resistance torque was beyond the target.
Each training session consisted of 10 min of passive ankle stretching of the ankle, 20 min of active assisted and resisted movement training through video game-play, then 10 min of stretching. Two types of active movement training were completed by the participants by voluntarily dorsiflexing and plantar flexing their ankle to play various computer games under real-time feedback, in which the robot may provide assistance after the patients tried but could not finish the movement task, or the robot provided resistance in order to challenge the patients if they could move the ankle in the game play (Fig. 1). Robot assistance during patient’s active movement training helped the patients reach the target and kept them engaged, while robot resistance continued challenging the patients to improve. The choice of assistive or resistive type of active movement training was dependent on the patient’s severity of disability.
For patients at the early stage of recovery with zero or little motor control capability, the wearable rehabilitation robot constrained the joint in an isometric condition and the patient’s potential re-emerging force-generation was detected sensitively by the wearable robot, and communicated to the patient through visual feedback as a yellow bar on the computer screen to guide them to generate consistent torque in the joint (Fig. 1a and 1b) (5).
Clinical and biomechanical evaluations were carried out before and after the 15 sessions of training (pre- and post-training) and, if possible, at a follow-up testing (6 weeks after the end of training).
Clinical outcome measures were evaluated including the Modified Ashworth Scale (MAS) for spasticity (31), Pediatric Balance Scales (PBS) (32), Selective Control Assessment of the Lower Extremity (SCALE) (33), Fugl-Meyer Lower Extremity (FMLE), 6-Minute Walk Test (6MWT), Timed Up-and-Go (TUG), and 10M Walk Test (10MWT).
Biomechanical evaluations included PROM, AROM, and muscle strength in terms of MVC. In addition to before and after multi-session training, MVC and dorsiflexion AROM were measured before and after each session. Ankle dorsiflexion PROM was evaluated under a controlled velocity of 10°/s and peak resistance torque of approximately 5 Nm. AROM was measured by asking patients to move the ankle voluntarily throughout its ROM between full plantarflexion and full dorsiflexion, while receiving visual feedback of the movement on the computer screen. The motor was controlled to be back drivable during the movement. Three trials were completed and the median value was taken as the AROM. Muscle strength in dorsiflexion was measured by locking the footplate at 0° dorsiflexion while the participant was asked to dorsiflex to his/her maximal ability 3 times. Visual feedback (yellow bar height in Fig. 1b) was used to guide the patient and verbal encouragement was given to the patient. Muscle strength in plantarflexion was measured in the same way, with the footplate locked at 0° dorsiflexion.
For all outcome variables, the group mean and standard deviation at pre- and post-training, and at follow-up were calculated. Analysis of variance (ANOVA) with repeated measures was used to test whether the change between pre-, post- and follow-up was statistically significant, using IBM SPSS Statistics, with a significance level of 0.05. The biomechanical and clinical outcome measures were the dependent variables, whilst the independent variable was the time-point with values of pre-, post- and follow-up. Paired comparisons were made between pre- and post-training conditions and between pre- and follow-up (over the 5 subjects with follow-up).
Furthermore, for outcome measures of AROM, MVC in dorsiflexion and MVC in plantar flexion, measured before and after each of the treatment sessions, improvement curves based on logarithmic fitting were derived for the pre- and post-session outcome measures similarly. The fitting equation was y = A*ln(x)+B, where A represents the rate of learning/improving and B indicates the initial performance of the patients.
Each session of robot-guided training induced changes in the outcome measures, as indicted by the pre- and post-session bar plots for each session. Biomechanical outcome measures, including dorsiflexion AROM, dorsiflexion MVC and plantarflexion MVC, are shown in Fig. 2. These improvement curves showed overall improvement in the patients’ motor control ability over 15 training sessions, as well as the improved performance due to each training session, as shown by the differences between the pre- and post-session improvement curves.
Fig. 2. Session-by-session pre- (blue) and post- (red) session biomechanical outcome measures over the 10 patients, including: (A) dorsiflexion active range of motion (AROM); (B) dorsiflexion maximum voluntary contraction (MVC); and (C) plantarflexion MVC. Improvement curves across the 15 sessions are fitted with logarithmic function for both pre-session (blue) and post-session (red) outcome measures.
For dorsiflexion AROM, dorsiflexion MVC and plantarflexion MVC, improvement curves based on logarithmic fitting y = A*ln(x)+B were derived from the pre- and post-session outcome measures. For pre-session AROM, the improvement curve was y = 6.9692*ln(x)–14.084 degree, with R2 = 0.8838. For post-session AROM, the improvement curve was y = 6.5973*ln(x)–10.76 degree, with R2 = 0.8612. For pre-session and post-session dorsiflexion MVC, improvement curves were y = 3.3602*ln(x)–2.3808 Nm, with R2 = 0.884, and y = 2.9002*ln(x)–0.6538 Nm, with R2 = 0.8861, respectively. For pre-session and post-session plantarflexion MVC, improvement curves were y = 3.4848*ln(x)+10.068 Nm, with R2 = 0.9126, and y = 3.22*ln(x)+11.136 Nm, with R2 = 0.878, respectively. The term B in the fitting equation derived from post-session outcome was greater than that from pre-session outcome, which was related to the improvement induced by each training session.
Comparing the results before and after each session, the median dorsiflexion AROM increased 2.73º (SD 1.14), median dorsiflexion MVC increased 0.87 (SD 0.90), median plantarflexion MVC increased 0.60 (SD 1.19) on average.
Biomechanical outcome improvements. Overall, median dorsiflexion AROM improved from –10.45° (SD 12.01) (a negative value indicated that the patient could not reach 0° dorsiflexion) before the multi-session training to 11.87° (SD 20.69) after the multi-session training (p = 0.089); dorsiflexion PROM improved from 20.00° (SD 9.04) to 25.00° (SD 8.03) (p = 0.131); dorsiflexion MVC improved from 0.21 Nm (SD 4.45) to 4.00 Nm (7.63) (p = 0.054); and plantarflexion MVC improved from 8.33 Nm (SD 10.18) to 18.45 Nm (SD 14.41) (p = 0.326). Due to leaving the study early or personal reasons, some subjects did not complete the test and training during some sessions. As a result, the overall results are not in complete agreement with the results of session 1 and session 15 in Fig. 2.
Improvements in clinical outcome with the multi-session training. Over training, spasticity of patients was reduced, with MAS scores of 2.00 (SD 0.74) (median and SD) and 0.50 (SD 0.70) at pre- and post-training, respectively (p = 0.004). SCALE improved from 4.00 (SD 3.19) to 8.00 (SD 4.18) (p = 0.133). PBS improved significantly, from 33.00 (SD 19.99) pre-training to 50.00 (SD 23.13) post-training (p = 0.038). 6MWT increased from 75.5 m (SD 164.0) before training to 313.2 m (SD 222.4) after training (p = 0.199). FMLE score increased from 14.0 (SD 10.11) to 23.0 (SD 11.40) (p = 0.07). Five out of the 10 patients were not able to walk at pre-training evaluation, and 2 were able to walk and perform the 6MWT and 10MWT after multi-session training. Among 5 patients who are able to walk at pre-training as well as post-training, both TUG and 10MWT improved, TUG reduced from 10.70 s (SD 9.18) before training to 7.57 s (SD 5.10) after training (p = 0.835); 10MWT reduced from 13.30 s (SD 7.77) before training to 8.80 s (SD 29.20) after training (p = 0.603).
Follow-up evaluation. Due to difficulty in re-calling patients for the 6-week follow-up evaluation, only 5 out of the 10 patients were able to return to complete the follow-up evaluation and robotic training experience questionnaire. The biomechanical outcome and clinical outcome measures for these 5 patents are shown in Table II. Follow-up evaluations indicated that most clinical and biomechanical outcome improvements were maintained.
Table II. Clinical and biomechanical properties measured at follow-up evaluation, pre- and post-training
The wearable robot with early feedback-guided motor training, stretching and active movement training provided a useful tool to promote neuroplasticity and improve motor control, functional balance and locomotion in children with TBI. As a pilot study using a wearable robot device in TBI rehabilitation, the intelligent control algorithm for forceful stretching helped reduce muscle/joint stiffness and relieve therapists from repetitive manual labour. The use of computer games offered motivating real-time feedback, the robot assistance kept participants engaged while the robot resistance continued challenging the patients, and a large number of repetitions was completed for significant changes.
Motor impairments of the ankle often persist long after injury and contribute directly to impaired gait and balance, and increased risk of falling. The use of robotics for rehabilitation has increased immensely in recent years. The majority of studies, however, have been performed on the adult stroke population (26–29), with relatively few studies on the paediatric TBI population. There is a lack of studies that emphasize the unique feature of facilitated motor re-learning and neuroplasticity using robotic training with paediatric acute TBI. More specifically, there is currently a lack of ability to detect patient’s potential weak re-emerging motor output signals during the initial stages of recovery in the clinical setting, which limits the ability to provide early feedback training to guide the patient in motor re-learning in the acute phase with heightened neuroplasticity. The current study aimed to help paediatric inpatients with TBI who are lying in bed and possibly have zero or little motor control to gradually regain motor control and mobility as much and as early as possible. This was done using closely guided motor re-learning based on progressive augmented real-time feedback with simplified and controlled tasks, sensory stimulus, and sensitive detection of re-emerging motor output signals using a proportioned yellow bar (see Fig. 1b) to guide the patients. The study tested children, as we anticipated that treatment using engaging games would be particularly motivating and appealing to this population. It has been suggested that children seem to respond well to programs that are creative and that challenge them, without being overwhelmingly difficult (34). Our results show that stretching combined with engaging active movement training was of benefit to children with TBI, as seen in this study. Patients demonstrated improvements in joint biomechanical properties, motor control performance, and functional capability in balance and mobility.
However, due to the small sample of inpatients with acute TBI, our work lacks a control group to identify how much the observed improvement was due to the robotic training. In order to evaluate and prove the performance of robotic training, we measured biomechanical parameters twice before and after every session. The measured biomechanical results and evaluation of learning curves indicate that patients’ motion ability improved dramatically after each training session (see Fig. 2), which validates the performance of robotic training.
The walking-related tests (6MWT, TUG and 10MWT) showed that walking endurance and speed increased significantly. Of note is that 5 subjects were unable to walk before the therapeutic training and the time needed to finish the tasks was then infinite. Although 2 of these subjects gained the ability to walk after the multi-week training, the corresponding pair of pre-post data were treated as missing data in the statistical analysis. Alternatively, a larger number, such as the longest time among the subjects who finished the walking tasks, could be used for those patients who could not walk before training. If so, the 10MWT and TUG still showed differences between the pre- and post-conditions with smaller p-values.
There are several limitations to the present study. First the aim of this preliminary study is to investigate the rehabilitation feasibility of the wearable robotic device and protocol with the acute TBI inpatient population, since there are limited studies that have emphasized the unique feature of facilitated motor re-learning and neuroplasticity using robotic training for acute TBI. Secondly, patients in this study were receiving acute inpatient rehabilitation, including physical and occupational therapy, while participating in the study, and patients might also have undergone natural recovery, which would also contribute to their improvement. Finally, a group with conventional TBI therapy alone should be included in future studies. In order to better understand if and how much the observed improvement was due to the robotic training, routine clinical training, and self-recovery, a randomized controlled trial is needed to examine the mixed effects, although this study was the only major intensive motor-sensory training provided to the children during their stay at the hospital. Future studies should also investigate the optimal dose and timing of therapeutic training and translation of the observed improvements to daily functional performance and participation in daily life.
This study was supported in part by the National Institute on Disability and Rehabilitation Research (NIDRR H133E100007) and National Science Foundation (IIP-0750515).
Disclosure: Li-Qun Zhang and Yupeng Ren hold equity positions in Rehabtek LLC, which received funding from the NIH (R42-HD043664) and NSF (IIP-0750515) in developing the rehabilitation robot used in this study.


 Click to show fullsize
Click to show fullsize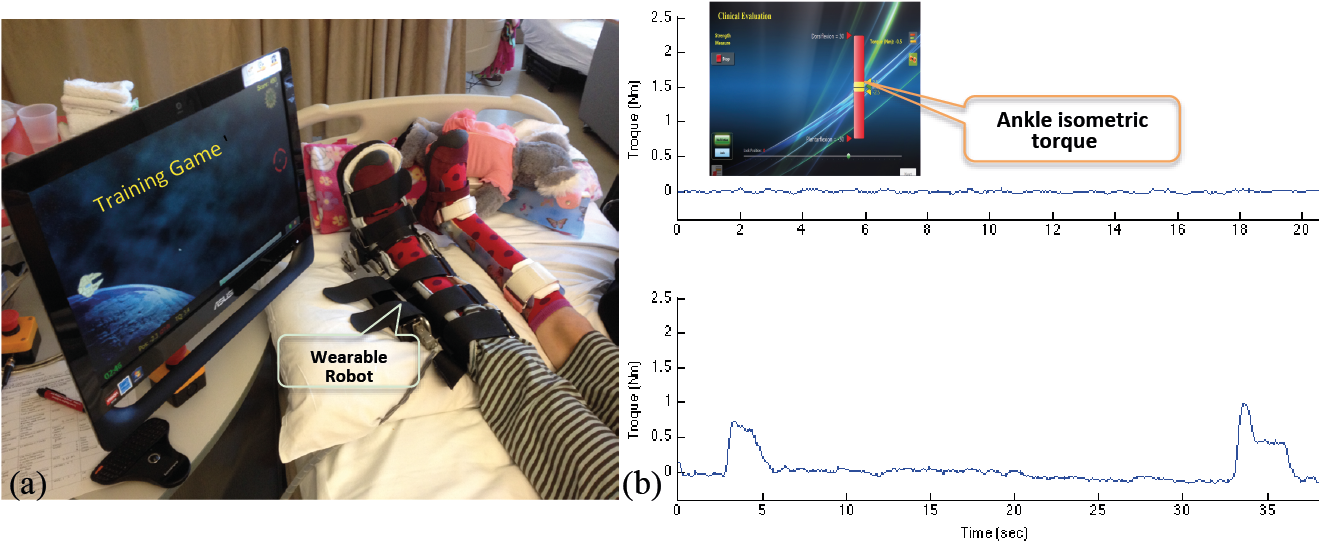 Click to show fullsize
Click to show fullsize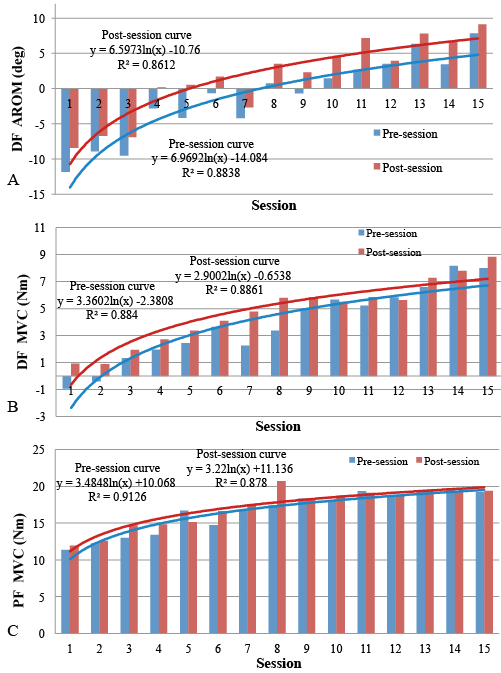 Click to show fullsize
Click to show fullsize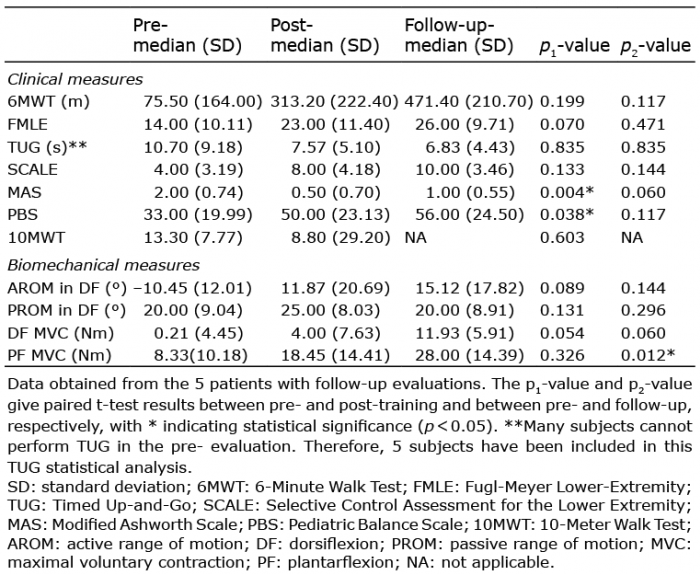 Click to show fullsize
Click to show fullsize