
From the 1Department of Translational Medicine – Hand Surgery, Lund University and Skåne University Hospital, Malmö and 2Department of Biomedical Engineering, Faculty of Engineering, Lund University, Lund, Sweden
*These authors contributed equally to this article.
Objective: Currently available hand prostheses lack sensory feedback. A “phantom hand map”, a referred sensation, on the skin of the residual arm is a possible target to provide amputees with non-invasive somatotopically matched sensory feedback. How-ever, not all amputees experience a phantom hand map. The aim of this study was to explore whether touch on predefined areas on the forearm can be associated with specific fingers.
Design: A longitudinal cohort study.
Subjects: A total of 31 able-bodied individuals.
Methods: A “tactile display” was developed consisting of 5 servo motors, which provided the user with mechanotactile stimulus. Predefined pressure points on the volar aspect of the forearm were stimulated during a 2-week structured training period.
Results: Agreement between the stimulated areas and the subjects’ ability to discriminate the stimulation was high, with a distinct improvement up to the third training occasion, after which the kappa score stabilized for the rest of the period.
Conclusion: It is possible to associate touch on intact skin on the forearm with specific fingers after a structured training period, and the effect persisted after 2 weeks. These results may be of importance for the development of non-invasive sensory feedback systems in hand prostheses.
Key words: artificial limbs; amputation stumps; sensory feedback; upper extremity.
Accepted Dec 20, 2018; Epub ahead of print Feb 27, 2019
J Rehabil Med 2019; 51: 210–217
Correspondence address: Birgitta Rosén, Department of Hand Surgery, Skåne University Hospital, SE-205 02 Malmö, Sweden. E-mail: birgitta.rosen@med.lu.se
A drawback of currently available hand prostheses is the lack of sensory feedback. Some amputees experience a feeling of touch of the amputated hand when the residual limb is touched. This kind of referred sensation is called “phantom hand map”. However, not all amputees experience “phantom hand map”. Therefore, we examined whether touch on predefined areas on the forearm can be associated with specific fingers in individuals with an intact arm, using a tactile display during a 5-week training period. In conclusion, it is possible to learn to associate touch on predefined areas on the forearm with specific fingers after a structured training period, and the effect persisted after 2 weeks. These results may be of importance for the development of non-invasive sensory feedback systems in hand prostheses.
Losing a hand is devastating to the individual, with large physical and psychological consequences (1). The loss of sensibility and motor functions is a major problem for the affected individual. Advances in engineering have made it possible to build more advanced hand prostheses with improved grasping alternatives and range of motion (2, 3), but there is no hand prosthesis that is even close to replacing all of the lost functions (1). Control of motor functions in the hand is highly dependent on sensory feedback (4). One priority in prosthetic design that is desirable among arm amputees is how to provide the user with sensory feedback (2, 3, 5–9). It has been shown that sensory feedback improves grasping control and performance with myoelectric hand prostheses in inexperienced users (10, 11). Both invasive and non-invasive sensory feedback systems are under development (2, 9, 12–19).
Following an arm amputation, a phenomenon described as referred sensation may occur. It is described as an experience of touch of the phantom fingers when touching the skin of the forearm and is herein called a “phantom hand map” (PHM) (20, 21). The PHM is unique for each individual and can differ from 1 or 2 diffusely located areas on the residual forearm with referred sensations, to a very detailed map with several specific areas where touch is experienced as touching the lost hand (20, 21). Furthermore, when touching specific areas in the PHM there is cortical activation in the primary somatosensory cortex (S1), which very closely resembles activation seen after touching the different fingers in an able-bodied subject (22). A non-invasive method for sensory feedback in hand prostheses utilizing the PHM has been presented (23).
For non-invasive sensory feedback, a 3-fold process is required; firstly, a registration of the tactile stimuli by sensors is needed, secondly, actuators for transferring the stimuli from the sensors to the user, and thirdly, a process of relearning is necessary with adaptation in the central nervous system to interpret the new afferent signals (23). An important issue when designing sensory feedback systems in hand prostheses is how the feedback should be presented to the user in order to be easy to interpret. The most optimal way to present sensory feedback is a combination of modality as well as somatotopically matched solutions (19). Modality matched sensory feedback is when the feedback is analogous to the external stimulation of the prosthesis, and therefore logical in the interpretation for the user. For example, if the fingertips of the prosthesis receive pressure the user should experience the stimulation as pressure (19). Mechanotactile stimulation (pressure) has been proven to be easier to discriminate, compared with vibrotactile feedback (21). Ideally the feedback should also be somatotopically matched, meaning that the individual experiences the feedback as if it was applied to the corresponding location on the lost limb (19). To achieve somatotopically matched sensory feedback non-invasively, the PHM can be used as a target for the actuators of the sensory feedback (21, 24). Some amputees and all congenital amputees lack the PHM on the amputation stump and therefore also lack the possibility to use the PHM as an interface for transferring sensory feedback from a prosthesis (25). Thus, it is interesting to explore if it is possible to learn to associate stimulation on areas on the skin on the forearm with specific fingers of the hand, i.e. to induce an association of touching the fingers when the forearm is touched.
The ability in localizing stimuli in the PHM has been investigated using vibrotactile or mechanotactile (pressure) feedback and pressure stimulation surpassed vibrotactile stimulation in multi-site sensory feedback discrimination (26). A study of 7 amputees has reported that electrotactile feedback in somatotopically matched areas was better than non-somatotopically matched feedback for both accuracy and response time (26). In another study of 11 subjects (9 able-bodied and 2 amputees) electrotactile stimulation was used to compare somatotopically matched areas with non-somatotopically matched areas concerning correct identification rate and response time. Results indicate that areas on the skin without referred sensation (non-somatotopically matched area) of the phantom hand can be learned to be associated with predefined stimulation areas (27).
The aim of this study was to explore whether touch on predefined areas on the forearm can be associated with specific fingers, using mechanotactile stimuli. A further aim was to investigate if the associated sensory learning is influenced by age and sex.
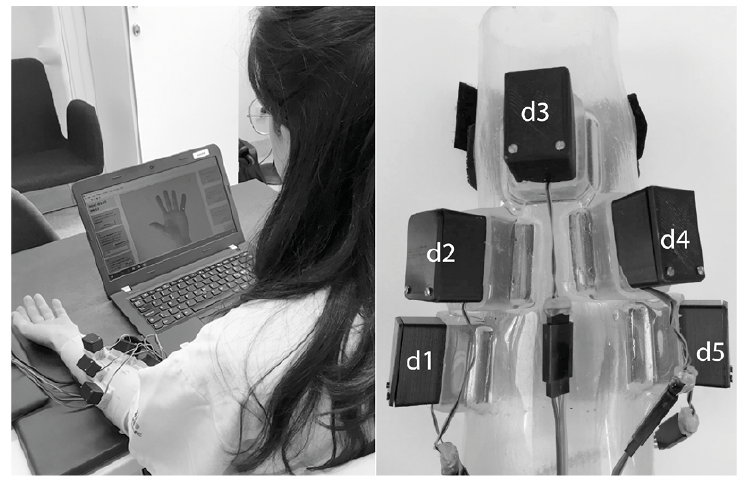
The study was conducted during 5 weeks for each participant, on 18 learning occasions, including follow-up at occasions 11, 17 and 18. Each occasion comprised 4 sessions (Table I). Each subject was provided with a silicone cuff to be placed on the forearm with 5 servo motors representing the 5 fingers, and constituting a tactile display that gave pressure stimuli in a pseudo random order during the learning sessions. The subject was seated in front of a laptop with the forearm resting on the table during the sessions (Fig. 1). While given stimulations on the forearm, the subject was provided with feedback on a screen with a photo of a hand with 5 fingers. The user application that was developed for the purpose of this study was used to control the tactile display (Fig. 1), provide the user with visual feedback, and log performance. The main menu of the user application can be seen in Fig. 2a.
Fig. 1. Left: The training set-up. Right: The cuff that was used on the left forearm, with the servo motors in the black boxes. d1 – Thumb, d2 – Index, d3 – Middle, d4 – Ring and d5 - little.
Fig. 2. Screenshots of the programme used during the training, showing the different training sessions. (a) Main menu. (b) Sessions 1, 2 and 4. (c) Session 3, correct answer. (d) Session 3, wrong answer (correct answer, thumb).
Able-bodied adults were included in the study and the exclusion criterion was regular medication with drugs that might inhibit concentration and learning. Thirty-five individuals enrolled in the study. The subjects were students recruited from the Faculty of Medicine, Lund University and staff at the Department of Hand Surgery, Skåne University Hospital, Malmö, Sweden.
The study was approved by the regional ethics review board in Lund (Dnr 2012/778) and all subjects gave their written informed consent. The study was conducted in accordance with the Declaration of Helsinki.
All subjects had a personal introduction to the programme and learning by one of the authors (UW), who instructed all subjects. The subjects were given a computer with a programme and the associated hardware, which they used at each learning occasion. The learning occasions were unsupervised during a 2-week period (Fig. 3) and the participant chose the location for training. Following the 2 weeks there were additional follow-up occasions. During the 2 weeks, there were 15 learning occasions in total. In the first week the training was completed twice a day during 5 days chosen by the subject (occasions 1–10). A minimum of 3 h should pass between each learning occasion. The following week the training was done once a day on 5 days chosen by the participant (occasions 11–15). Occasion 11 was the first follow-up and was completed in the same manner as the first training occasion. The second follow-up (occasion 17) took place one week after completion of the learning period, and the third follow-up (occasion 18) 1 week later (2 weeks after completion of the training period, i.e. 5 weeks in total to complete the training period).
Fig. 3. Learning protocol. Bold text with square borders denotes occasions for the analysis of the age groups and the learning progress. During the first week the training was done twice a day, the second week; once a day and the follow-up weeks (week 2, 4 and 5) only once. On each occasion, there are 4 sessions.
Each occasion contained 4 sessions (Fig. 3). Each session consisted of 30 stimulations (6 on each finger in a pseudorandom order). The 4 sessions were as follows:
The reason for starting with an evaluation session was to capture the acquired stimulation association from the previous occasion and, in addition, to be able to assess the learning curve between the occasions and not within the same occasion where the sessions are closely executed. Completing an occasion took less than 15 mins. The time lapse between the start of each single stimulation was 10 s. If the subject did not respond within 10 s, the next stimulation begun automatically and a non-answer was recorded.
The study setup consisted of a tactile display (28) using 5 HS-40 Nano analogue servo motors (HI-TEC RCD, USA) incorporated in a silicone cuff with 3D-printed boxes. The boxes were placed in an upside-down U-shape, resembling the positions of the fingertips (Fig. 1), similar to previous work (28). During the sessions, the tactile display was placed on the left forearm. When positioning the tactile display for the first time, the boundaries were marked on the skin of the subject to ensure identical placement between each occasion.
A circular wheel horn was attached to the servo motor axis, which provided a rotational motion. A t-shaped rod was attached to the wheel horn and this mechanical combination converted the rotary motion of the motor to a linear motion of the rod (Fig. 4). The system provided a detectable indentation perpendicular to the skin (5 mm indentation, 17 mm2 area) with a force that was sustained for 3 s. The distance between the stimulation points on the skin was 40 mm; the minimal distance to detect 2-point discrimination on the forearm (29). The servo motors were controlled by a microcontroller, Arduino Nano, which acquired data from a graphical user interface developed in LabVIEW (National Instruments, Austin, TX, USA) through a serial interface.
The graphical user interface guides the subjects through 4 training sessions, which are described in detail in previous section Learning. Prior to each session, the subjects got a descriptive pop-up window about the coming session. The programme was designed to be descriptive, to make sure that the subjects could use it unsupervised. During the sessions, a picture of a hand was shown. The subjects were instructed to select the finger, using a mouse, onto which they associated the perceived stimulation. Depending on which session was running, the subject was given visual feedback about their performance (Fig. 2). The software logged the subjects’ information, such as age and sex, along with each subject’s perceived stimulation value and the actual stimulation value for each occasion and session. At the end of every occasion the subject had the opportunity to leave a comment about complications or other experiences during the learning sessions.
Fig. 4. Cross-section of the 3D-printed box, containing a servo motor with a circular horn, which provides with a linear motion together with the plastic rod, which in turn gives mechanotactile feedback on the skin.
In order to evaluate the agreement between the actual stimulation and the response from the subjects, the linear weighted Cohen’s kappa was calculated for each subject. By using a linear weighted model, a response that is more distant finger-wise to the actual stimulation were weighted more heavily than a response that is closer to the actual stimulation. The strength of the kappa value was assessed according to Brennan & Silman (30); values < 0.20 are considered poor, values between 0.21–0.40 are considered fair, 0.41–0.60 moderate, 0.61–0.80 good and 0.81–1.00 very good. The kappa value was calculated for each individual that participated and the median kappa value and 95% confidence interval (95% CI) was calculated for each training occasion.
To determine if the changes in the learning curve were statistically significant the Wilcoxon signed-rank test was used. The kappa value was compared between paired observations; occasion 1 (baseline), 11 (1st day, week 2), 17 (2nd follow-up, week 4) and 18 (3rd follow-up, week 5). These occasions were chosen in order to analyse the learning progress between the first and second week, and also if 1 week without training would affect the new learned skill.
To assess if there were any differences between sexes the 2-tailed Mann–Whitney U test was used. This unpaired test can determine the differences between 2 groups and it is also useful in small groups (minimum 5).
To determine if there was a difference between age groups the 2-tailed Mann–Whitney U test was used. The age groups were divided into 4 different groups; 20–29 (1 male and 10 females), 30–39 (2 males and 7 females), 40–49 (2 males and 2 females) and > 50 years (1 male and 6 females).
Both pre-processing of data and analysis were performed in Python, using packages such as Pandas (https://pandas.pydata.org/) SciPy (https://www.scipy.org/) and scikit-learn (http://scikit-learn.org/stable/).
For the analysis, the first evaluation session in every occasion was chosen to evaluate the progression of learning, which shows progression from the previous occasion rather than comparing the progress within a single training occasion.
Of the 35 subjects, 31 completed the study (25 women and 6 men). All but 2 were right-handed. The median age was 37 (range 22–66) years. The 4 individuals who did not complete the study dropped out at an early stage without having to state a reason.
The training protocol was structured, but, in some cases, there were minor discrepancies in the programme, as the subject performed the study unsupervised. A few days of delays in the programme were recorded (2–7 days) for some subjects. In total, 18 learning occasions were planned in the programme, and among the subjects, 16–19 learning occasions were recorded. The cause of this was either due to technical problems, some of the subjects repeated the occasion, or that the subjects missed some occasions.
By examining the learning progress during the training period, the results show that the weighted linear kappa value has a high median value throughout all occasions, and the baseline value was kappa = 0.84 (> 0.8; considered very good (30)). However, there is a distinct improvement up until the third training occasion (kappa = 0.92) (Fig. 5). The kappa value then stabilizes over the rest of the period; occasion 11 median kappa = 0.96, and continues to be high during the 2 last occasions; occasion 17 median kappa = 0.96 and occasion 18 median kappa =0.96. The improvements between baseline (occasion 1) and the chosen follow-ups (occasions 11, 17 and 18) were significant (p < 0.001); baseline compared with the 1st day of week 2, 2nd follow-up week 4 and 3rd follow-up week 5. The agreement between actual stimulation and interpretation of stimulation (learning curve) peaked at occasion 12 (median kappa = 0.98). Outliers presented in Fig. 5 were unique individuals at every occasion of different age and sex, and did not follow a pattern that could be used for analysis.
The subjects’ ability in distinguishing which finger was stimulated is shown in Fig. 6. It was easiest to distinguish the middle finger, where 95% of the answers were correct. Hardest to distinguish were the ring and little finger (84% correct answers), and most errors occurred when the stimulus was on the little finger and the response was the ring finger (16%).
Fig. 5. The box plot shows improvement (in median kappa values) in learning during the 18 occasions, with 95% confidence interval (95% CI). The learning and evaluation was completed twice a day during occasion 1–10, once a day during occasion 11–15 was done once a day and once per week during occasion 16–18. The underlined occasions show the follow-ups. The improvement was statistically significant (***p < 0.001) between the baseline and the 3 follow-ups.
Fig. 6. The confusion matrix shows correct answers (in %). It was easiest to distinguish the area for the middle finger and it was as easy to interpret stimulation on a predefined area for the little finger as for the ring finger. The sum of the numbers shown in the matrix does not add up to exactly 100% due to rounding.
Comparing men and women, the 2-tailed Mann–Whitney U test showed there was no statistically significant difference in kappa value between the sexes. Of those participating in the study only 6 were men and 25 were women. The same statistical test also showed that age did not have any influence on learning, when comparing the kappa values of the different age groups.
Among the comments from the subjects a different sensation was described in the predefined area that the subject should associate with the middle finger. The sensation was reported to be perceived as tingling or as a stronger stimulation compared with stimulations of the other areas. Some subjects also reported minor differences in the sound from the servo motors during the stimulation.
This study shows that it is possible to induce an association between stimuli on the skin of the forearm with specific fingers following a structured training programme and that the association remain after 2 weeks. The results also show that it is easy to learn to interpret the stimuli on the skin of the forearm, and already after 3 training occasions the agreement between the actual stimuli and the response can be considered very good (30). The excellent agreement remains after 1 week of no training and still after 2 weeks after the end of the training programme. The fast learning that is shown in our group of 31 subjects is comparable with results presented by Chai et al. (27) who reported a “3-day-effect” in their study of 11 subjects during 7 consecutive days. The subjects in our study had a longer learning period and also 2 occasions per day during the first week, which indicates that the subjects learn even faster and within a day. The learning could even have a “3-occasion-effect” with at least 3 h in between occasions. In our study we used mechanotactile stimuli, which has been proven to be easy to interpret for sensory feedback (24). Mechanotactile is also a more common modality to receive as sensory feedback in daily use compared with vibrotactile or electrotactile stimuli, which was used by Chai et al. (27). The very good agreement between stimuli and responses in our study indicates that it is possible to learn predefined areas on the forearm skin that is comparable to referred sensation in capacity to localize the predefined areas. Chai et al. (27) show similar results, and non-somatotopically matched areas reached comparable levels to the somatotopically matched areas considering response time from the actual stimulation to the response of the perceived stimulation, during those 3 training days (27). Our result opens up for the possibility for amputees without referred sensations, as well as for congenital amputees, to learn the association and keep it prolonged for at least 2 weeks. Compared with our experimental learning set-up, prosthesis users would probably wear a prosthesis with sensory feedback more frequently and therefore get more confident with the sensory associations.
Learning as a concept is defined as an encoding of memory and is the process of “gradual changes in behavior as a function of training” (31). In the dual code theory there are separate “channels” to process information from different senses. Therefore, multiple senses should be used to facilitate learning, without exposing the working memory to fatigue (32). Three learning styles for adults are described; visual, auditory and kinesthetic, and the best learning is achieved when these 3 approaches are combined (33). In our study we apply visual and kinaesthetic (sensory) information at the same time, and in accordance with the dual code theory and the 3 learning styles this should ease the learning. A well-known concept in psychology and cognitive literature is the spacing effect (34). The spacing effect implies that practice is spread over a period of time and the opposite is when practice is massed at one or few close occasions. When the same amount of time is spent practicing, learning is most effective when spaced over time (34, 35). The memory tends to last longer, since spaced learning keeps new cells maintained (36). It has also been shown that the best learning occurs when the practice intervals were expanding over time (37). In the current study the spacing effect was applied and the occasions were spaced over a period of 5 weeks. In the first week the training occasions were made twice a day, the second week the training was made once a day and there was an interval of 1 week made respectively for the last 2 occasions. Another concept used in research for learning and memory is the testing effect. The effect in long-term memory is better when memory tests are made during the period of practice (38). In the present study every learning occasion included both a pure learning session and testing session where the subject received feedback on the responses. This may have been advantageous for learning.
No difference was seen in learning over time between the sexes. However, the group of men was small, only 6 men participated compared with 25 women, and the lack of statistical significant difference may be due to lack of statistical power. The results did not show any differences between the different age groups.
The U-shape of the tactile display imitates the order and positions of the fingers and may ease the intuitive interpretation of the stimuli of the predefined area with the specific finger. The middle finger was easiest to discriminate, whereas the little finger stimulation was most frequently mistaken, and instead associated with being the ring finger. A possible explanation for this is the U-shape. The stimulation for the middle finger was applied over the flexor tendons to the fingers and the median nerve, and some of the subjects reported a different sensation (tingling), or a stronger sensation of the stimulations of the area for the middle finger compared with stimulations of the other finger areas. The middle finger stimulation was applied in the centre and the most distally on the forearm and might have become a reference for the other stimulated areas which were either on the one or the other side of the middle finger. There was barely any misperception between the stimulations on different side of the middle finger (digit 1↔digit 4), (d1↔d5), (d2↔d4) and (d2↔d5), but it was more difficult to discriminate adjacent fingers (d1↔d2) and (d3↔d4). Nerve innervation is a possible explanation, the 3 radial sites (d1, d2 and d3) were applied to skin that is innervated by the median nerve, and the 2 ulnar sites (d4 and d5) were applied on skin innervated by the ulnar nerve.
Stimulation on the forearm comprised pressure from servo motors, and it is impossible to avoid mechanical noise. Since the speed of rotation of the servo motor was set to be the same, when applying pressure on the pre-defined area on the forearm, the 5 servo motors should sound similar. However, some subjects noticed that some servo motors could slightly differentiate in sound, which may have affected the performance in the progression of learning. According to dual code theory, the involvement of more senses can facilitate learning. Therefore, for future clinical use, the noise could be an additional sense to enhance learning.
The long-term aim of the study was to enable amputees who do not experience a PHM to use non-invasive methods of sensory feedback in hand prostheses, as reported previously (23). The present study was performed with able-bodied subjects who all had continuous afferent nerve signalling from the forearm and hand. This is in contrast to a forearm amputee who only has afferent signalling from the forearm. Furthermore, previous studies have shown that plasticity following a change in afferent patterns results in more nerve cells in S1 supplying the forearm area (39). The lack of (competing) afferent signals from the hand and an increased neuronal supply to the forearm leads us to suggest that a person with a forearm amputation would learn to associate touch on specific points of the residual forearm faster than able-bodied individuals.
The PHM is an ideal interface for transferring sensory information from receptors in the hand prosthesis to the amputee. However, some amputees lack a PHM, but the results of this study suggest that it is possible to learn to associate touch on predefined areas on the forearm with specific fingers. For clinical use it might not be necessary to receive stimulation from 5 sites. By applying only 3 predefined areas for stimulation in the U-shape (d1, d3 and d5), it might be even easier to discriminate the stimulations because of the increased distance between the stimulation points. D’Anna et al. (40) has also argued that trying to remember an increased number of received force levels is a cognitive burden, and that it is easier for the subjects to distinguish 3 different force levels than a larger number of levels. This argument could be applied to our study; that it might be easier for subjects to identify only 3 stimulation positions rather than identifying 5 stimulation sites. In a scenario with a myoelectric prosthesis only 3 stimulation actuators, instead of 5, in combination with the wider distance, could therefore make it easier to make adjustments of the areas for sensory stimulation when positioning the EMG electrodes for controlling the motor functions.
Future studies should assess the effects of the described training protocol and the possibility to learn to associate touch on predefined areas on the forearm with specific fingers in amputees without a PHM and in congenital amputees.
This study was supported by the Promobilia Foundation and Skåne County Council Research and Development Foundation. The authors thank Jan-Åke Nilsson for help with the statistical analysis and the subjects who participated in the training period.


 Click to show fullsize
Click to show fullsize Click to show fullsize
Click to show fullsize Click to show fullsize
Click to show fullsize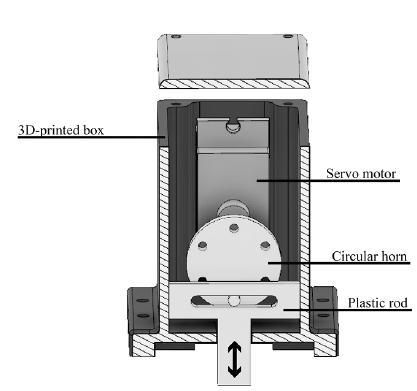 Click to show fullsize
Click to show fullsize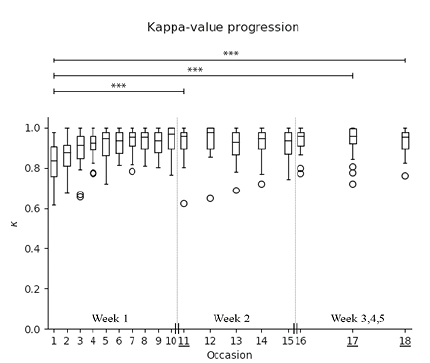 Click to show fullsize
Click to show fullsize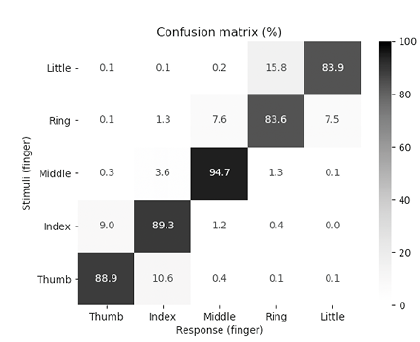 Click to show fullsize
Click to show fullsize