
From the 1Department of Health and Care Sciences, Faculty of Health Sciences, University of Tromsø, The Arctic University of Norway, 2North Norway Rehabilitation Center, Tromsø, 3Sunnaas Rehabilitation Hospital, Nesodden, 4Department of Coaching and Psychology, Norwegian School of Sport Sciences, Oslo, Norway, 5Department of Epidemiology and Biostatistics, Loma Linda University, Loma Linda, CA, USA, 6Department of Clinical Therapeutic Services, University Hospital North Norway, Tromsø, and 7Department of Cardiology, Oslo University Hospital Ullevål and Institute of Clinical Medicine, University of Oslo, Oslo, Norway
Objective: To assess the effects of robot-assisted locomotor training in patients with chronic incomplete spinal cord injury.
Design: Randomized single-blind controlled clinical trial.
Setting: The intervention site was an outpatient clinic, and pre- and post-evaluations were performed in a rehabilitation hospital.
Patients: A total of 24 subjects with American Spinal Injury Association Impairment Scale grades C or D, > 2 years post-injury.
Interventions: Subjects were randomized to 60 days of robot-assisted locomotor training, or to usual care.
Methods: Walking function, lower extremity muscle strength and balance were assessed single-blinded pre- and post-intervention.
Results: After a 9-year recruitment period, only 24 of the planned 30 subjects had been enrolled (mean time since injury 17 (standard deviation (SD) 20) years for all subjects). Walking function, lower extremity muscle strength and balance improved modestly in both groups, with no statistically significant group difference in walking function or muscle strength, whereas postural control declined significantly in the intervention group, compared with controls (p = 0.03).
Conclusion: Late-onset robot-assisted locomotor training did not re-establish independent walking function. A modest, but non-significant, effect was seen on muscle strength and balance. However, significant between-group differences were found only in postural control in the control group.
Key words: spinal cord injury; robot-assisted locomotor training; gait; treadmill.
Accepted Mar 12, 2019; Epub ahead of print Mar 21, 2019
J Rehabil Med 2019; 51: 00–00
Correspondence address: Anu Piira, North Norway Rehabilitation Center, Conrad Holmboes veg 95, NO-9011 Tromsø, Norway. E-mail: anu.piira@kurbadet.no
This randomized clinical trial assesses the effects of robot-assisted treadmill training in persons with chronic incomplete spinal cord injury acquired > 2 years earlier. Due to recruitment challenges, it was possible to recruit only 63% of the planned number of participants. The intervention group received gait training 3 days per week for a period of 6 months and the control group received usual care with their local physical therapist. The intervention group showed improvements in lower extremity strength and balance, but no change in walking function. Significant between-group difference was found only in postural control, favouring the control group. Because the target number of study participants was not reached, the study was underpowered and non-significant, and thus the findings are inconclusive. This training method may have benefits, but the robotic device is expensive and training effects are limited when the person’s baseline function is poor and the training starts late in incomplete spinal cord injury.
Various locomotor training methods have been used in attempts to recover walking function after spinal cord injury (SCI). Older (1, 2) and more recent studies (3–7) have reported promising results by using robotics to recover gait. A review from 2017 concluded that robot-assisted locomotor training (RALT) had effects similar to other types of body-weight-supported locomotor training, and to the same amount of conventional training or physical therapy (8), in re-establishing walking independence and endurance/distance walked.
A number of randomized controlled trials (RCTs) using robotic walking therapy have been conducted with varying types of control groups, degree of injury, time since injury, site of the lesion, and varying number and length of the training sessions (3–7, 9–11). These and other factors, such as use of anti-spastic medication, all seem to influence the outcome.
Several RCTs have compared different intensive training forms in subjects with chronic or subacute SCI. However, these studies control groups did not receive “usual care”. Rather, the control groups received other interventions, such as over-ground gait training with or without functional electrostimulation (4, 11), conventional physical therapy (3), or body-weight-supported locomotor training with manual assistance (11).
Spontaneous improvement after SCI can occur up to 2 years post-injury (12), and, as expected, uncontrolled studies of training in the early phase after injury show more recovery of walking function than when training starts later. Regardless of methodological differences in the studies, there seems to be consensus that early gait training in motor incomplete SCI improves walking function irrespective of the training method (8).
Subjects with incomplete SCI with more severe functional deficit also seem to benefit from RALT. However patients without walking function before training are also frequently unable to walk independently after intervention (1, 11, 13).
There are little data available regarding late-onset training in subjects severely affected by SCI. We recently published a controlled study on manually assisted weight-supported locomotor training in subjects with chronic incomplete SCI (2+ years post-injury), with severely reduced or no walking function (13). The rationale for the present robot-assisted RCT was to investigate whether a less personnel-demanding robot-assisted training programme would have similar treatment effects as the manually assisted approach in comparison with control groups receiving usual care. The 2 studies are parallel in design, outcome assessment and time, but the participants, training site and staff are different.
Compared with our previous study (13), which recruited subjects nationally, subjects in this study were eligible if they lived within 70 km of the training site. Recruitment occurred either from Sunnaas Rehabilitation Hospital or through advertisements in magazines for persons with SCI. Written informed consent was obtained prior to inclusion. The study was approved by the Regional Committee of Ethics (REK) in North Norway (P REK NORD 69/2008 and 2009/634-5) and ClinicalTrials.gov identifier #NCT00854555.
Inclusion criteria included age 18–70 years, motor incomplete SCI classified as American Spinal Injury Association (ASIA) Impairment Scale (AIS) C or D at least 2 years post-injury. Subjects should be mainly wheelchair-dependent with or without some walking function, have a body mass index (BMI) < 30, and be cognitively unaffected. Exclusion criteria were conditions that might prevent or conflict with locomotor training (13) or physical limitations for using the robotic device.
Evaluation and testing were completed within 30 days before randomization, and post-evaluation within 14–30 days after completion of the intervention/control period. Examiners were not involved in the training. Subjects were randomized to either intervention (I) or control group (C) using concealment by sealed envelopes. The outpatient intervention site was located in the Oslo area. Assessments were conducted single blindly at Sunnaas Rehabilitation Hospital. Subjects were instructed to not change their anti-spasticity medication during the study period.
Intervention subjects received 60 days of RALT, with 3 training sessions per week over a period of 6 months. The Lokomat® gait training robot (version 4.0) (HOCOMA, Zürich, Switzerland) was used. Each session included preparation (stretching, fitting harness, etc.) for approximately 20–30 min, stepping on a treadmill 20–60 min with body-weight support < 40% of the subject’s initial weight, and, finally, a few minutes of overground walking and/or exercises on the treadmill if time permitted. Subjects’ feet and hips were secured to motorized braces and, during the treadmill walking, the subjects received continuous feedback on their contribution to the movements. Computer-controlled motors, synchronized with the speed of the treadmill, moved the subjects’ legs through trajectories that imitate physiological gait patterns. One therapist managed the training session. Progression in the training programme was defined as a reduction in body-weight support, adjusted guidance force and/or an increase in walking speed.
Similar to the control group of our manually assisted RCT (13), control subjects received low-intensity usual care from their local physical therapist, usually 1–5 times per week. Their daily activities and training were recorded in a diary that was submitted once a month. To secure compliance, control subjects received regular follow-up telephone calls.
The primary outcome was full or partial recovery of walking function, and there were several secondary outcomes: walking speed and endurance were assessed using the 10-m walk test (10MWT) and 6-min walk test (6MWT). Lower extremity motor score (LEMS), a subscale of ASIA classification, was used to evaluate strength in the lower limbs. Dynamic balance and postural control were assessed by Berg’s Balance Scale (BBS) and the Modified Functional Reach test (MFR), respectively. All tests have been described in detail elsewhere (13).
Sample size. Based on our unpublished pilot data and literature (1, 13), it was estimated that 30 subjects (15 in each group) were needed to obtain a statistical power of 0.80 with alpha error 0.05 for the outcomes walking speed, endurance and balance.
The main statistical analysis compared mean or median changes from baseline to final evaluation. The 2 groups were compared at baseline using χ2 test/Fisher exact for categorical variables and independent sample t-test (2-tailed, significance level p < 0.05) for continuous variables. For non-normally distributed data, Mann–Whitney test was used. Paired samples t-test or Wilcoxon signed-rank test were used to analyse changes within groups. Difference in change between the 2 groups was assessed using Mann–Whitney test. Effect size was calculated using correlation coefficient, r, to determine the magnitude of the treatment effects. All analyses were performed using the 23rd version of SPSS for Windows (IBM SPSS, Armonk, New York, USA).
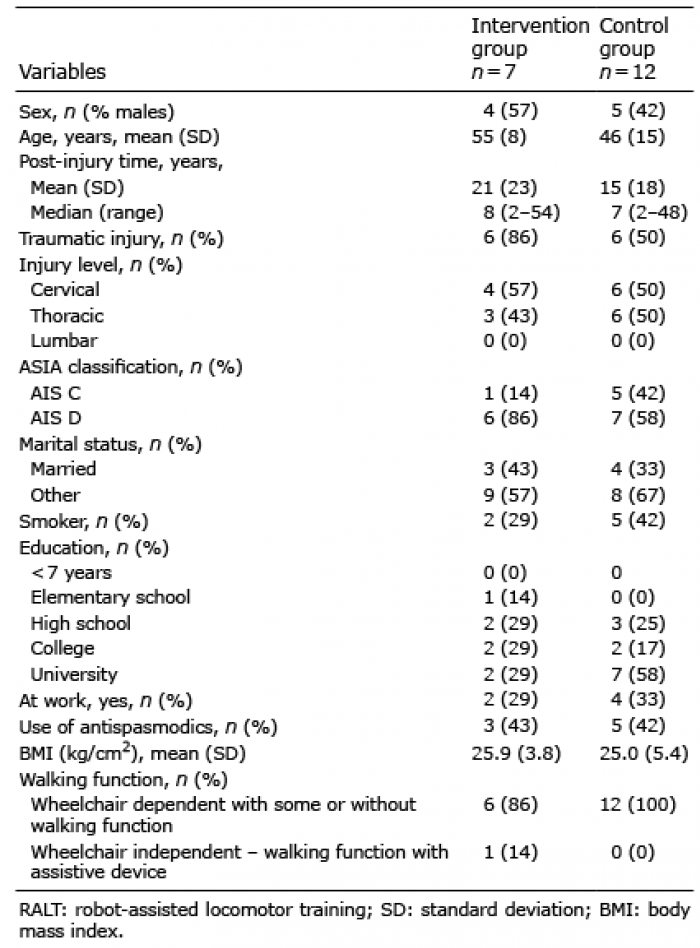
It was not possible to recruit the predetermined number of subjects within a reasonable time. After 9 years, only 24 of the planned 30 subjects had been randomized. Four subjects had an early dropout from the intervention group, and 1 was non-compliant (completed only one-third of sessions). Thus, the study population included only 7 intervention and 12 control subjects. There was no significant group difference at baseline, although the intervention group was older (mean 9 years), had a larger proportion traumatic SCIs, and had less walking function at baseline (Table I).
Table I. Baseline demographics of the final sample of subjects according to the Intervention or Control group with robot-assisted locomotor training (RALT)
The intervention was well tolerated with no adverse events, except for minor issues such as small leg abrasions. In the control group, no change in the frequency of physical therapy sessions was noted. The intervention subjects had a mean of 59 days (standard deviation SD 2 days) of RALT, and sessions lasted 48 min (SD 8 min). The mean distance walked was 2,271 m (SD 465 m), and the mean body-weight support was 40% (SD 21%), with a guidance force of 82% (SD 8%) per training session.
Walking speed and endurance. Despite randomization, the groups differed in several respects. All subjects in the intervention group had some walking function, whereas 3 subjects in the control group were unable to walk. Also, the controls with some baseline walking function had twice the walking speed and endurance compared with the I-group. Both groups improved or maintained their walking speed (10MWT) at post-test. However, the group difference in improvement was small and not statistically significant. Mean endurance (distance walked), as measured by the 6MWT, improved more in the control group (23.1 vs 6.6 m, not significant) than the intervention group (Table II).
Lower extremity motor score. In the intervention group, LEMS increased by 5.4 points, vs 0.2 in controls (Table II).
Balance. Changes measured by BBS, were minimal, but there was a statistically significant group difference in postural control (MFR), which declined 8.6 cm more in the intervention compared with the control group (Table II).
Table II. Changes in walking speed and walking distance, strength, and balance from baseline to evaluation 2–4 weeks post-intervention/control period
This study is among the first RCTs to include only subjects with chronic incomplete SCI (AIS C and D) > 2 years post-injury, when spontaneous recovery is no longer expected. Furthermore, the study includes a control group that received low-intensity usual care. The effects of RALT were small and not statistically significant. Similar to previous studies, RALT was well tolerated and safe with no serious injuries reported (8).
Our results confirm those of previous studies: Field-Fote and co-workers reported non-significant improvements in walking parameters both for RALT and other interventions, except over-ground training, in a group with baseline gait function similar to our study (11), as did Duffell et al. (7) and Niu et al. in their non-blinded RCTs (5). However, the latter study demonstrated significant improvements in walking speed and endurance in the higher functioning group, and Varoqui et al. reported 0.08 m/s improvement in their I-group, against no effects in controls (6).
LEMS scores > 30 are common in subjects with functional walking, whereas scores < 20 are associated with poor walking function at baseline (9, 14). Our baseline scores were mostly intermediate, and improved after RALT, similar to previous findings (3, 4). Those with higher baseline LEMS, seem to gain most improvement in walking speed (11).
There were poor baseline balance scores with significant improvement (4.3 points) in the intervention group compared with controls (3.2 points). However, postural control declined, possibly due to training-related stiffness. In comparison, balance assessed with the Timed-Up-and-Go test, also improved in 3 small RALT studies (1, 5, 6). RALT may improve truncus stability, and even a small improvement here may be important to a person with poor function in daily life (8, 9).
A recent meta-analysis (8) concludes that gait training in subjects with injury < 1 year ago (2–4) have better effects on walking function than studies, such as the present and others (1, 5–9, 13), conducted years after injury. In addition, LEMS improves most in subjects with subacute SCI (3, 4), whereas among subjects with chronic SCI, only minor improvements are found (1, 11). Cheung et al. (8) argue that neuroplasticity is more efficient in the acute stage, and repetitive functional gait training improves muscle activation and facilitates learning of new walking patterns to a larger degree at this stage.
It was decided to include subjects with poor baseline walking function since data on their training effects are more limited. Mirbagheri et al. (10) found that subjects with more baseline neuromuscular disturbances were more likely to have reduced spasticity after RALT. Based on studies so far, including meta-analyses (8), the effects of RALT on walking function remain inconclusive, and it is still unclear whether subjects with chronic SCI without baseline gait function are able to regain functional walking (5, 10, 11). However, even among non-walkers, there appear to be some benefits of gait training, such as improved VO2 and neuromuscular control (9, 10).
The present study has several strengths: most important is the usual care control group. A single centre reduces method variation, and single-blind design diminishes evaluation bias. Post-injury time > 2 years reduces spontaneous improvement, allowing a lower number of subjects.
The main limitations are the slow recruitment and the drop-out subjects. Thus, the study was statistically underpowered with a low likelihood of detecting modest improvements, albeit, large enough to demonstrate no major gains. The number of eligible subjects was overestimated. Due to the 2-year post-injury inclusion requirement, some subjects were well-established in their life with a disability, and reluctant to invest the time and effort required. The low number of subjects recruited resulted in unbalanced baseline characteristics (Table I). For instance, the C-group had a baseline walking function twice that of the I-group, which may have attenuated potential positive effects, as could the fact that the usual care (C-group) had over-ground gait training in some cases. More intense or longer training would hardly be tolerated, and furthermore, no relation was previously found between training dose and outcome in various gait training protocols (15). Our experience exemplifies the complexity of this type of clinical research.
In conclusion, the primary goal of re-establishing walking function was not achieved, and between-group differences in secondary outcomes were not observed, except the unexpected decline in postural control favouring the control group. Small, non-significant improvements in lower extremity strength and balance were found, but not in walking function. As the study was underpowered, it cannot be excluded that RALT may have some, although modest, effects on this subject group. The fact that both manual (13) and the present robot-assisted RCT gave such small gains among subjects with chronic incomplete SCI, suggests that the treatment effects are limited and cost-benefit low when baseline function is poor and training starts late in subjects with incomplete SCI.
We thank Sunnaas Rehabilitation Hospital at Nesodden, Norway, for recruiting patients. We appreciate the cooperation of the patients’ organizations LARS (National association of the spinal cord injured) and LTN (National association of the traffic injured). The efforts of the physical therapists and others who guided the robot-assisted locomotor training are highly appreciated. Finally, we could not have performed this study without the excellent testing team at Sunnaas.
The study was funded by the Norwegian Health Authorities and the Norwegian Health and Rehabilitation funds. Gjensidige insurance company donated the LOKOMAT® gait training robot.
The authors have no conflicts of interests declare.


 Click to show fullsize
Click to show fullsize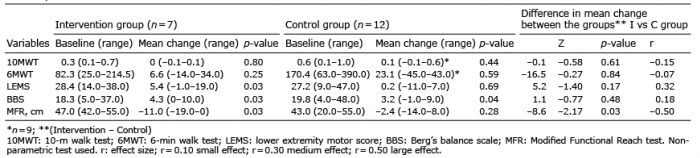 Click to show fullsize
Click to show fullsize