OBJECTIVE: To evaluate the controllability of, and physiological responses to, 2 newly designed unilaterally-propelled wheelchairs for patients with hemiplegia.
DESIGN: Within-subject comparison.
SUBJECTS: A total of 15 patients after stroke were recruited from the rehabilitation centre of Chung Shan Medical University, Taichung, Taiwan.
METHODS: Two newly designed wheelchairs (an ankle-propelled wheelchair and a knee-propelled wheelchair) were compared with a commercially available 2-hand-rim propelled wheelchair. Patients propelled the 3 wheelchairs along an oval pathway. Videotapes were made for analysis. The following parameters: total propulsion time, deviation frequency, deviation percentage, physiological cost index (VO2) and rating of perceived exertion were measured and compared.
RESULTS: The knee-propelled wheelchair gave the best results for controllability, cardiopulmonary and perceived exertion. However, the gear ratio of this wheelchair’s force transmission was fixed, and some patients felt that its propulsion was heavy when starting off.
CONCLUSION: The knee-propelled wheelchair showed good controllability and physiological responses for hemiplegic patients. If some details were improved, it would suitable for use by patients with hemiplegia.
Key words: wheelchair, leg-propelling, stroke, rehabilitation.
J Rehabil Med 2007; 39: 693–697
Correspondence address: Kuen-Horng Tsai, Graduate Institute of System Engineering National University of Tainan, No. 33, Sec. 2, Shu-Lin Street, Tainan 700, Taiwan. E-mail: tsaikh@mail.nutn.edu.tw
Submitted December 14, 2006; accepted May 7, 2007.
INTRODUCTION
A wheelchair is important for people with hemiplegia to improve their mobility and avoid accidents during recovery (1–3). For manual wheelchairs, only the push force tangential to the hand-rims contributes to propulsion. Previous research has shown that the use of wheelchairs with low mechanical efficiency causes upper extremity injuries and physiological strain (4–6). Although a variety of designs, such as the hand-lever drive (7, 8) and crank propulsion (9, 10), have been developed to improve propulsion efficiency and reduce injuries (11–13), most of these wheelchairs were designed only for users with healthy upper limbs.
In general, most patients with hemiplegia use only their unaffected arm and leg to propel a wheelchair. To facilitate the propulsive pattern, the wheelchair’s leg rest on the patient’s unaffected side is usually removed, and the patients are expected to stamp their unaffected foot on the ground to produce propulsive force and direct the wheelchair. Asymmetrical forces generated by this arrangement, however, may cause the wheelchair to stray toward the affected side on a level surface, which may be dangerous on a slope (14). Some patients with hemiplegia use the unaffected quadriceps muscles to extend the leg to push themselves backwards while sitting in the wheelchair. However, using this method the user has restricted vision in the direction of movement, which is of great concern in rehabilitation centres because a collision with other patients may cause severe injury.
Leg control is another means of wheelchair propulsion. It should be more effective to propel a wheelchair with one’s legs than with one’s arms, because the leg muscles are stronger. Leg propulsion requires less than half the effort of arm propulsion for individuals with spinal cord injuries (15, 16). Furthermore, using the legs to propel a wheelchair increases the circulation and conditioning of the lower extremities for wheelchair users. In 1983, an exercise bicycle was introduced using functional electrical stimulation (FES) (17). Four muscles of the lower extremities are required to move the wheel a full rotation. If one or more of the muscles is not strong enough, or if the 4 muscles cannot work in harmony with each other, the bicycle will stop. This is not a suitable device for both indoor and outdoor transportation. In a design patented in 1985 for a leg-propelled wheelchair (18), the illustration in the patent showed that the legs were required to move linearly in a manner that may produce a significant amount of friction. Bloswick et al. (19) evaluated the manoeuvrability and usability of 3 knee-extension propelled wheelchairs and suggested that wheelchairs using a swing or sliding belt mechanism were preferable to those using a sliding plate. Although the study provided valuable information about leg propulsion, the participants were elderly people, not patients with hemiplegia. Stein et al. (15, 16) proposed a new model of wheelchair propulsion, in which movement is generated either by residual voluntary activation of the quadriceps and hamstring muscles, or by electrical stimulation of these muscles. The results showed that significantly less effort was required than for earlier leg-propelled wheelchairs. However, the device is too large and complicated for most patients after stroke, and because it is too heavy to fit into a car and too difficult to operate in narrow spaces, it is impractical for patients with hemiplegia to use regularly.
There have been many excellent studies (14, 20, 21) evaluating the performance of manual wheelchairs for patients after stroke, but none have provided data on specialized wheelchairs for hemiplegia. We recently developed 2 types of unilaterally- operated wheelchairs that allow patients with hemiplegia to move the wheelchair forwards and backwards and to make turns, using their unaffected lower legs (22). The purpose of the present study was to evaluate the controllability and physiological responses of each new wheelchair and to compare them with those from a commercial 2-hand-rim propelled wheelchair (TPW).
METHODS
Wheelchairs
Two newly designed wheelchairs were compared with a commercial TPW.
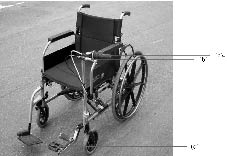
Two-hand-rim propelled wheelchair. The TPW (Fig. 1) was a commercial wheelchair (Sunrise Medical Inc., Torrance, CA, USA) with 2 hand-rims on the patients’ unaffected side. The patient uses the unaffected hand to propel ambilateral wheels by pushing the 2 hand-rims. The inner hand-rim is for the wheel on the unaffected side and the outer hand-rim is for the wheel on the affected side. The patient may either push both hand-rims at the same time or each hand-rim alternately to move the wheelchair forwards, backwards, or to turn. To stop or slow the wheelchair, the patient holds the hand-rims for each drive wheel.
Ankle-propelled wheelchair (APW). For forward and backward movement with the APW (Fig. 2: prototype), the patient uses the unaffected arm to turn the wheel on the unaffected side, and uses the unaffected foot to turn the other wheel by stepping on a modified footrest with the foot and ankle joint. The stepping style is similar to that required to operate a treadle sewing machine. The force is transmitted to the rear wheel via a 4-bar linkage system on the unaffected side. At the same time, the patient can use the other hand-rim, also set on the unaffected side, to provide extra power for the wheel on the affected side when the 4-bar linkage system is at a dead point and unable to transmit power to the rear wheels. To turn the wheelchair, the patient can control the speed difference between the 2 wheels by stepping the footrest and pushing the hand-rim at different speeds.
Knee-propelled wheelchair (KPW). The KPW (Fig. 3: prototype) uses a propulsion lever and a pedal to translate knee flexion and extension into wheelchair movement. To use this wheelchair the patient places the unaffected leg on the pedal and then extends the lower leg. As the propulsion is pushed forward, the wheelchair moves forward. The unaffected hand controls the direction of wheelchair by steering a handle module connected to the castors. The KPW has 3 different hub gears (forward, neutral and reverse) on the rear wheels. The patient uses a special handle bar in the handle module to change gear. There is a brake on the handle.
Fig. 1. Two-hand-rim propelled wheelchair (TPW). (a) Hand-rim for left-hand wheel propulsion and (b) Hand-rim for right-hand wheel propulsion propelled by the left arm.
Fig. 2. Ankle-propelled wheelchair (AKW). (a) Four-bar linkage system for power transmission, (b) hand-rim for left-hand wheel propulsion, (c) hand-rim for right-hand wheel propulsion propelled by the left arm, and (d) pedal for right-hand wheel propulsion stepped on by the unaffected foot.
Fig. 3. Knee-propelled wheelchair (KPW). (a) A steering lever connecting to the caster for direction control, (b) brake, and (c) pedal extended for the unaffected foot for rear-wheel propulsion.
Experimental protocol
Subjects. A total of 15 stroke patients (8 men, 7 women, age range 45–73 years) (Table I) were recruited from the Subsidiary Rehabilitation Center of Chung-Shan Medical University. All subjects signed an informed consent approved by the medical ethics committee of Chung-Shan Medical University. All the patients had right-side hemiplegia and were excluded if they had significant respiratory or musculoskeletal morbidity. The 3 eligibility criteria were no record of hemianopia, no severe cardiopulmonary disease, and not taking any medicine that affected their heart rate (e.g. β-blockers). The main physical symptoms of the subjects were unilateral limb weakness and asymmetrical movements, but they had enough co-ordination, balance and range of motion of the upper and lower limbs to propel themselves in each of the 3 wheelchairs. The patients practised operating each wheelchair for 30 minutes per day per wheelchair for 3 days a week under the supervision of the physical therapist during a 3-week training course arranged to enable them to operate each wheelchair smoothly before the actual test.
| Table I. Subject characteristics |
| Patient characteristics (n = 15) | |
| Age (years), mean (SD) | 53.0 (9.5) |
| Gender (male/female) | 12/3 |
| Height (m), mean (SD) | 1.6 (0.05) |
| Weight (kg), mean (SD) | 68.9 (14.4) |
| Side of stroke (right/left) | 15/0 |
| Dominant side (right/left) | 15/0 |
| Onset time (month), mean (SD) | 19.3 (9.7) |
| Smoking history (yes/no) | 1/14 |
| Wheelchair experience (yes/no) | 15/0 |
| SD: standard deviation. |
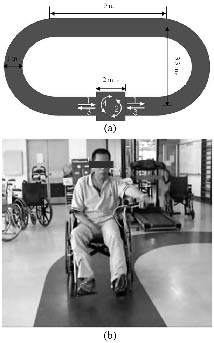
Field test. The weight of the 3 wheelchairs was normalized, and all tyres were changed to 24 and 3/8-inch pneumatic tires with 40 psi of pressure. The field test included 2 phases. In phase 1 the patients propelled themselves forwards anticlockwise along an oval pathway 1 metre wide and 30 m from start to finish. The first lap was completed when the patients arrived at the starting position (Fig. 4). In phase 2, after circumrotating the patients propelled themselves clockwise on the same pathway back to the start position. All patients were instructed to propel each wheelchair as fast as they could during the test.
Fig. 4. (a) Oval pathway. (b) Field test.
For the controllability evaluation, a video record was made while patients were performing the tasks. Then the physical therapists watched the videos at least twice and calculated the total propulsion times, deviation frequencies, and deviation times for the 3 wheelchairs in the straight and curved portions of the pathway. The definition of “deviation” was “both the castor and rear wheel of one side ran over the pathway boundary”, and the “deviation percentage” was defined by dividing the deviation time by the total propulsion time.
For cardiopulmonary response measurements, before the test, the heart rate (HR, beats/min) and oxygen consumption (VO2, ml/min/kg) were measured for 2 min as rest HR and VO2, respectively. The VO2 in the last 30 sec of the exercise test was measured. The physiological cost index (PCI, beats/m) was obtained by subtracting the HR at rest from the HR during the last 30 seconds and dividing the result by the average speed of the wheelchair (23). In addition, a rating of perceived exertion (RPE) was used to measure subjective exertion at the end of each test and to compare the efforts during propulsion.
Data analysis. Statistics Package for the Social Sciences (SPSS, version 12; SPSS Institute, Chicago, IL, USA) was used for all statistical analysis. All parameters, including total propulsion time, deviation frequencies, deviation percentage, PCI, VO2 and RPE, were compared between the 3 types of wheelchair using a 1-way ANOVA with repeated measures. A Scheffe post hoc test was used to detect statistically significant differences in the dependent variables across the tests. Statistical significance was set at p < 0.05.
RESULTS
All patients completed the 60-m tasks using the 2-hand-rim propelled wheelchair TPW, APW and KPW, and none reported any adverse reactions to the tasks. It took the patients significantly less time to propel the KPW than the TPW and APW around the test oval (Table II). That means that the KPW was significantly faster than the TPW and APW.
The deviation frequencies of KPW took significantly less (p < 0.05) than that of TPW and APW in different regions (Table II). Regarding deviation percentage, all 3 types of wheelchair revealed a higher percentage in the curve region than in the straight region (Table II). The deviation percentage of KPW appeared to be significantly lower than that of TPW and APW in the curve region. The results meant that the APW and TPW went over the boundary more easily than the KPW.
There were no significant differences in VO2, but the mean value of the VO2 of the KPW was the lowest of the 3 types of wheelchair (Table III). The KPW took significantly (p < 0.05) less PCI than the TPW and APW. The level of RPE of the KPW was significantly (p < 0.05) less than that of the TPW and APW. These results indicated that the KPW was significantly easier to control and significantly more efficient than the other 2 types of wheelchair.
| Table II. Propulsion times, deviation frequency and deviation percentage of the 3 types of wheelchair during the field test. All values are means (standard deviation) (n = 15) |
| | Straight portion | Curve portion | Total |
| Propulsion time (sec) |
| TPW | 137.3 (35.4) | 156.1 (44.1) | 369.1 (86.8) |
| APW | 180.5 (65.8) | 102.6 (41.9) | 331.0 (92.0) |
| KPW | 67.1 (14.13) | 46.9 (8.7) | 163.2 (41.6) |
| p | 0.00 | 0.00 | 0.00 |
| Deviation frequency (beats) |
| TPW | 5.8 (3.3) | 11.1 (3.4) | 19.4 (5.9) |
| APW | 5.9 (3.0) | 5.5 (2.7) | 12.8 (4.5) |
| KPW | 0.8 (1.1) | 1.7 (1.3) | 4.2 (1.9) |
| p | 0.00 | 0.00 | 0.00 |
| Deviation percentage (%) |
| TPW | 21.1 (11.2) | 40.5 (15.6) | 30.9 (12.2) |
| APW | 24.6 (16.4) | 31.5 (20.2) | 26.0 (18.5) |
| KPW | 10.2 (6.1) | 16.9 (12.9) | 14.2 (7.2) |
| p | 0.132 | 0.02 | 0.06 |
| Statistically significant values are shown in bold type. TPW: 2-hand-rim propelled wheelchair; APW: ankle-propelled wheelchair; KPW: knee-propelled wheelchair. |
| Table III. Cardiopulmonary responses and rating of perceived exertion (RPE) levels for the 3 types of wheelchair. All values are means (standard deviation) (n = 15) |
| | VO2 | PCI (beats/m) | RPE |
| TPW | 5.8 (2.6) | 1.51 (0.59) | 15.1 (1.7) |
| APW | 5.8 (1.6) | 1.35 (0.56) | 14.8 (1.6) |
| KPW | 4.8 (1.7) | 0.70 (0.29) | 10.8 (1.5) |
| p | 0.60 | 0.03 | 0.00 |
| Statistically significant values are shown in bold type. TPW: 2-hand-rim propelled wheelchair; APW: ankle-propelled wheelchair; KPW: knee-propelled wheelchair; PCI; physiological cost index. |
DISCUSSION
In general, patients after stroke are able to use manual wheelchairs by propelling the hand-rim with the unaffected hand and pushing the ground with the unaffected leg (14). However, the asymmetrical forces may cause the wheelchair to stray towards the affected side. It is difficult and dangerous for patients with hemiplegia to propel manual wheelchairs over a long distance, go up a slope, or change direction. In the present study, 2 newly designed wheelchairs that allow patients after stroke to propel the wheelchair forwards, backwards, and to turn were compared with a commercially available 2-hand-rim propelled wheelchair.
Type TPW. The most severe problem with the TPW was that it required more power to propel than our patients after stroke were able to provide. Videos showed that the patients used only the unaffected arm to simultaneously push both hand-rims. Insufficient arm strength may be more likely to result in upper-extremity injuries in patients after stroke than in wheelchair users who have more strength and who are able to use both arms to propel the wheelchair. Some patients complained of shoulder or wrist pains during the field test. The second significant weakness of the TPW was direction control. Patients had to simultaneously turn and propel the wheelchair using only the unaffected arm. This ergonomic shortcoming of the TPW made it difficult to steer, especially on test-path curves. PCI, RPE, propulsion time, and deviation frequency data on curves for the TPW were the worst controllability results for the 3 wheelchairs. The strong points of this wheelchair, however, are that it is foldable, portable and easy to get in and out of.
Type APW. The most serious problem with the APW was the propulsion skill required. Patients had to use the unaffected arm to propel the wheel on that side, and also use the unaffected foot to propel the wheel on the other side by pedalling a specialized footrest with their foot and ankle joint. The advantages of this design were that both the unaffected arm and leg could be used to propel the wheelchair, thus providing more power than possible with a TPW. However, most patients were unable, even after 3 weeks’ training, to master the mode of propulsion sufficiently to allow them to operate the APW. The APW had better controllability on curves than the TPW, but contrariwise in straight region. Another design weakness of the APW was its loss of energy caused by the 4-bar linkage system on the drive mechanism. This energy loss was noticeable for most patients.
Type KPW. Hemiplegic patients using the KPW moved faster than those using the TPW and APW. This indicated that it was more efficient to propel the KPW than the TPW with only one arm and the APW with the unaffected hand and leg. Although both the APW and KPW require legs to propel them, the major muscles and joints used during propulsion are different. Muscles in the lower leg are used for the APW; however, muscles in both the lower and upper legs are used for the KPW. Furthermore, the controllability of the KPW was superior to that of the other 2 wheelchairs because the deviation frequency and deviation percentage were much lower. It was easier for patients with hemiplegia to control the KPW using a steering lever than using the unaffected leg and arm to control wheel speeds and direction adjustment while propelling the APW. The brake on the lever handle was also beneficial. Because speed of the KPW was higher than that of the other 2, the brake was necessary to ensure the user’s safety. On the other hand, some details of the KPW should be modified. A variable gear ratio is desirable. The ratio of the pedal and rear wheel rotation was fixed, and some patients felt that it took too much heavy pedalling to start the KPW.
Leg-propelled wheelchairs are alternatives for wheelchair users. Previous studies (24, 25) concluded that the maximum workload for leg exercise is greater than that for arm exercise and that the cardio-respiratory responses of arm propulsion are higher than those of leg propulsion. Stein et al. (16) had reported the energy consumption of patients with paraplegia propelling a wheelchair with both legs with electrical stimulation and claimed that leg propulsion required less than half the effort of arm propulsion. Bloswick et al. (19) studied the manoeuvrability and usability of 3 knee-extension propelled wheelchairs via 5 standard wheelchair activities with elderly residents of an extended care facility. The results showed that the wheelchair design using a swing or sliding belt mechanism was preferred to those using a sliding plate, and that KPW was a feasible alternative to hand propelled wheelchairs. Although the above 2 studies provided creditable data for leg propulsion, the test participants were not patients with hemiplegia.
There are few studies of the effectiveness of hemiplegic subjects propelling a wheelchair with their lower limbs. In 2005, Makino et al. (26) conducted an interesting study to determine whether patients with hemiplegia with a gait disturbance could propel a leg-pedalled wheelchair alternately with both legs, and whether it was easier and faster for them to pedal that than to propel a traditional wheelchair. The researchers found that patients with hemiplegia could propel the leg-pedalled wheelchair using both legs alternately and that the speed was faster and the PCI lower than for propelling an ordinary wheelchair. The study provided valued information about patients with hemiplegia using a specialized wheelchair. The present study showed the same trends: the controllability and PCI of leg-propelled wheelchairs were better than those of wheelchairs propelled solely using unaffected hands. In the study by Makino et al. (26) the affected leg passively driven by the unaffected leg using circular propulsion (similar to that used to propel a bicycle), but such an asymmetrical style would undoubtedly increase the workload of the unaffected leg and possibly cause fatigue.
For patients after stroke, to propel traditional manual wheelchairs consumes a great deal of energy and is painful; it may also easily cause accidents. For these reasons, some researchers and clinicians believe, apparently with little evidence, that patients after stroke who propel themselves in manual wheelchairs will induce immediate increases in abnormal muscle tone and posture and thus may reduce later physical abilities (20). A suitably designed wheelchair, one that considers ergonomics and the physiological condition of stroke patients, ought to promote independence and confidence in these patients, as well as increase their cardio-respiratory fitness and create no physiological complications such as abnormal muscle tone and posture.
In conclusion, because of its ergonomic design and consideration of the physiological condition of patients after stroke, the KPW gave the best performance evaluation results of the 3 wheelchairs tested in the present study. With suitable and necessary adjustments, the KPW would be suitable for use by patients with hemiplegia.
ACKNOWLEDGEMENTS
The authors thank the patients and staff who participated in this project. This research was supported by grant NSC 91-2614-E-218-001 from the National Science Council, Taiwan.
REFERENCES
1. Gresham GE, Granger CV, Linn RT, Lulas MA. Status of functional outcomes for stroke survivors. Phys Med Rehabil Clin N Am 1999; 10: 957–966.
2. Barber SL, Bunzel R, Monga TN. Wheelchair utilization and satisfaction following cerebral vascular accident. J Rehabil Res Dev 2002; 39: 521–534.
3. Barker DJ, Reid D, Cott C. Acceptance meanings of wheelchair use in senior stroke survivors. Am J Occup Ther 2004; 58: 221–230.
4. Pentland WE, Twmey LT, The weight-bearing upper extremity in women with long term paraplegia. Paraplegia 1991; 29: 521–530.
5. Sie IH, Waters RL, Adkins RH, Gellman H. Upper extremity pain in the postrehabilitation spinal cord injured patient. Arch Phys Med Rehabil 1992; 73: 44–48.
6. Subbarao JV, Klopstein J, Turpin R. Prevalence and impact of wrist and shoulder pain in patients with spinal cord injury. J Spinal Cord Med 1995; 18: 9–13.
7. Romero RS, Bayes BD. Wheelchair hand propulsion apparatus. US patent 4,865,344. 1989.
8. Engel P, Seeliger K, Technological and physiological characteristics of a newly developed handlever drive system. J Rehabil Res Dev 1986; 23: 37–41.
9. Noyola R. Auxiliaty frame with propulsion and steering means for attachment to wheelchair. US patent 5,899,476.1999.
10. Parisi PJ. Wheelchair manual drive mechanism. US patent 5,037,120. 1991.
11. de Boer YA, Cambach W, Veeger HEJ, van der Woude LHV. Wheelchair prototype testing: a new lever-drive system in comparison with existing propulsion mechanisms. J Rehabil Sci 1992; 5: 39–44.
12. van der Woude LH, Botden E, Vriend I, Veeger D. Mechanical advantage in wheelchair lever propulsion: effect on physical strain and efficiency. J Rehabil Res Dev 1999; 34: 286–294.
13. van der Woude LH, Dallmeijer AJ, Janssen TW, Veeger D. Alternative modes of manual wheelchair ambulation: an overview. Am J Phys Med Rehabil 2001; 80: 765–777.
14. Kirby RL, Ethans KD, Duggan RE. Wheelchair propulsion: descriptive comparison of hemiplegic and two-hand patterns during selected activities. Am J Phys Med Rehabil 1999; 78: 131–135.
15. Stein RB, Chong SL, James KB, Bell GJ. Improved efficiency with a wheelchair propelled by the legs using voluntary activity or electric stimulation. Arch Phys Med Rehabil 2001; 82: 1198–1203.
16. Stein RB, Roetenberg D, Chong SL, James KB. A wheelchair modified for leg propulsion using voluntary activity or electrical stimulation. Med Eng Phys 2003; 25: 11–19.
17. Petrofsky JS, Glaser RM. Vehicle for the paralyzed. US patent 4,421,336. 1983.
18. Glaser RM, Petrofsky JS, DuFour HR. Wheelchair and drive system therefore. US patent 4,523,769. 1985.
19. Bloswick DS, Erickson J, Brown DR, Howell G, Mecham W. Maneuverability and usability analysis of three knee-extension propelled wheelchairs. Disabil Rehabil 2003; 25: 197–206.
20. Pomeroy VM, Mickelborough J, Hill E, Rodgers P, Giakas G, Barrett JA. A hypothesis: self-propulsion in a wheelchair early after stroke might not be harmful. Clin Rehabil 2003; 17: 174–180.
21. Kirby RL, Adams CD, MacPhee AH, Coolen AL, Harrison ER, Eskes GA, et al. Wheelchair-skill performance: controlled comparison between people with hemiplegia and able-bodied people simulating hemiplegia. Arch Phys Med Rehabil 2005; 86: 387–393.
22. Tsai KH, Yeh CY, Lo HC. Applications of concurrent systematic design on assistive technology – a new wheelchair design for stroke patients. FMBE Proceedings EMBEC ‘05, 3rd European Medical & Biological Engineering Conference 2005; 11: 28.
23. MacGregor J, editor. The Objective measurement of physical performance with long-term ambulatory physiological surveillance equipment (LAPSE). Proc 3rd Int Symp on Ambulatory Monitoring. London: Academic Press; 1979, p. 29–39.
24. Ahlborg G, Jensen-Urstad M. Metabolism in exercising arm vs. leg muscle. Clin Physiol 1991; 11: 459–468.
25. Aminoff T, Smolander J, Korhonen O, Louhevaara V. Prediction of acceptable physical workloads based on responses to prolonged arm and leg exercise. Ergonomics 1998; 41: 109–120.
26. Makino K, Wada F, Hachisuka K, Yoshimoto N, Ohmine S. Speed and physiological cost index of hemiplegic patients pedaling a wheelchair with both legs. J Rehabil Med 2005; 37:83–86.